| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $32.51 | $31.84 | $30.85 | $29.52 | Contact US |
 Robot Car Parts w/ Motors & 3DOF Robot Arm for 3-Mode Smart Cars (Differential + Ackerman + Mecanum)
$52.08
Robot Car Parts w/ Motors & 3DOF Robot Arm for 3-Mode Smart Cars (Differential + Ackerman + Mecanum)
$52.08
 3-Mode Line Follower Car (Differential + Ackerman + Mecanum) + Robot Arm + STM32F103C8T6 + Controller
$92.70
3-Mode Line Follower Car (Differential + Ackerman + Mecanum) + Robot Arm + STM32F103C8T6 + Controller
$92.70
 3-Mode Line Follower Car (Differential + Ackerman + Mecanum) + Robot Arm + STM32F103C8T6 Core Board
$84.15
3-Mode Line Follower Car (Differential + Ackerman + Mecanum) + Robot Arm + STM32F103C8T6 Core Board
$84.15
Specifications:
- Working current: 31mA
- Analog output: 32 channels
- Current capacity: up to 16 servos per side, maximum current capacity 15A, total capacity 30A on both sides
- Serial input: USB/TTL232 (baud rate: 19200)
- Steering gear control resolution: 0.09 ° / 1 us (pulse width)
- PC board size: 40mmx 50mm
- Action storage: 4KB
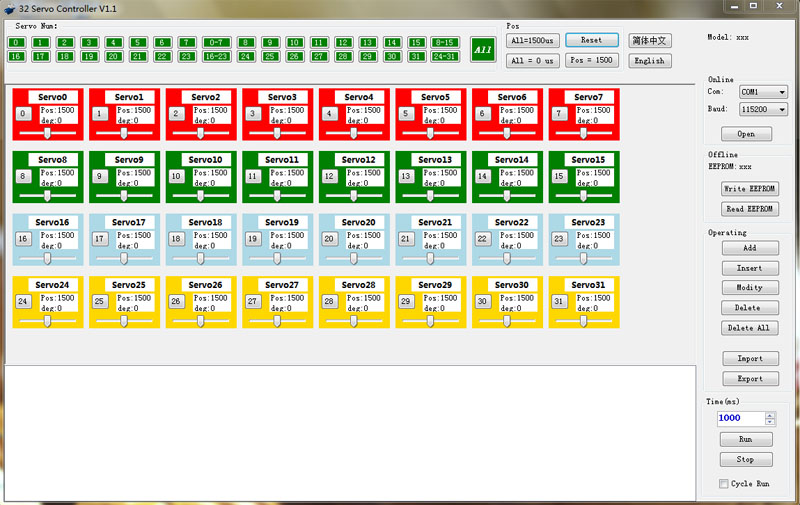
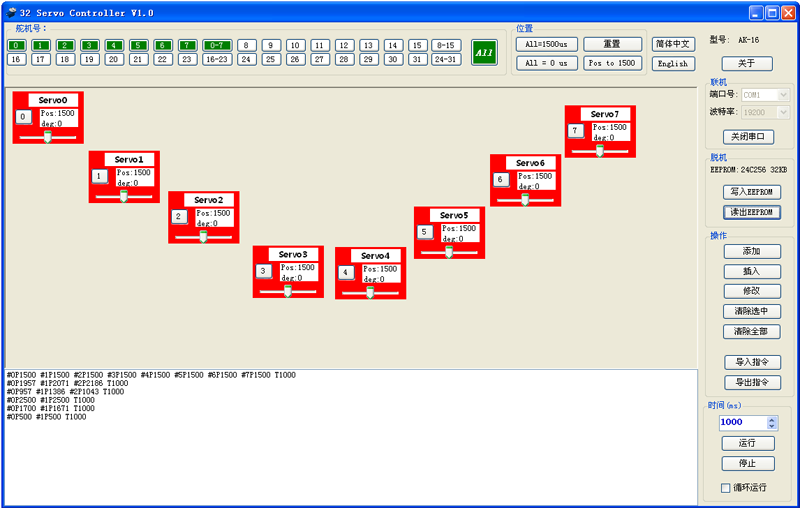
Introduction to control instructions (instructions):
The servo controller is transmitted through the serial port command to realize PWM output control of 32 servo ports.
#0 P1500 <cr>
Move the servo connected to the servo 0 pin to a position with a pulse width of 1500us (ie, the median of a normal 180° servo).
#0 P2250 T10000<cr>
The servo is moved from the original 1500 position to the position corresponding to the 2250 pulse width in 10 seconds. (ie timed movement)
#0 P750 S1000<cr>
This is to move the servo from 2250 to 750 in 1.5 seconds. (ie fixed speed movement)
2250(uS)-750(uS)/1000(uS/Sec) = 1.5Sec
#0 P1500 #1 P1000<cr>
This command can test two servos to 1500uS and 1000uS respectively.
#0 P2250 #1 P750 T1000<cr>
This command moves the servo on pin 0 from the last 1500uS position to 2250uS, while the servo on pin 1 moves from 1000uS to 750uS. Although the angles of the two servos are different, the steering of the two servos will be completed in 1 second. (synchronous movement)