| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $944.50 | $925.23 | $896.32 | $857.76 | Contact US |
 TR500S 24V 300W DC Brushless Motor Tank Chassis Robot All-Terrain Chassis Rubber Track Assembled Load 50KG No Controller
$1,989.77
TR500S 24V 300W DC Brushless Motor Tank Chassis Robot All-Terrain Chassis Rubber Track Assembled Load 50KG No Controller
$1,989.77
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$273.65
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$273.65
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
4WD ROS Car Robotic Car Comes With 7" Touch Screen A2 Radar ROS Master For Raspberry Pi 4B 4GB
Version Introduction (4WD ROS Car With Touch Screen):
It boasts four-wheel independent drive, pendulum suspension and 7" removable touch screen.
It comes with wireless controller (joystick), car chassis, STM32 controller, charger, ROS master for Raspberry pi/Jetson nano, depth camera, laser radar, etc. You can run the ROS system when you receive the goods.
Description:
Based on the robot platform developed by ROS Education, Ackerman/Differential, Mecanum wheel, omni wheel, tracked vehicle and other structures can be purchased. Electronic control can be shared for these versions, which can realize map navigation, autonomous obstacle avoidance, radar follow, visual follow, visual line patrol, APP image transmission, etc. A full set of PDF manuals and video tutorials are provided.
Features:
- ROS educational robot
- 500-line photoelectric encoder
- 130pcs open-source ROS related starter video tutorials: https://www.bilibili.com/video/BV1qh41197TZ/
- Photoelectric encoder
- Laser radar navigation
- 3d visual navigation
- Voice navigation (optional voice module)
- Pendulum suspension
- Free mechanical design
- Frequency modulated laser radar
- Adjustable camera angle
- Patented product
- Built-in PID controller
- CAN/Serial control
- ROS operating system
- For FreeRTOS system
- Provide video tutorials
- Provide development manual
Advantages & Functions:
Voice Navigation:
Voice module boasts 6ch microphone array. It supports sound source location, voice call, voice control, voice navigation (Optional voice module)
High-Precision Photoelectric Encoder:
Upgraded 500-line high-precision AB-phase photoelectric encoder. Its accuracy is more than 38 times that of Hall encoders offered by other producers. The low-speed navigation performance of a car equipped with a photoelectric encoder is very good
12V Motor Parameters:
- Rated voltage: 12V
- Rated power: 4.32W
- Motor type: permanent magnet brush
- Locked-rotor current: 2.8A
- Locked-rotor torque: 10kgf.cm
- Rated current: 360mA
- Rated torque: 1.0kgf.cm
- Speed before deceleration: 11000rpm
- Speed after deceleration: 366±10rpm
- Reduction ratio: 1:30
- Output shaft: diameter 6mm, D-shaft eccentric shaft
Encoder Parameters:
- Type: photoelectric encoder
- Number of lines: 500*30 (measured with the output shaft of the reducer)
- Power supply voltage: 3.3~5V
- Featured function: Built-in pull-up shaping, STM32 encoder interface mode, hardware counting
- Interface type: XH2.54
Pendulum Suspension:
Chassis equipped with pendulum suspension system
Laser Radar:
Based on our excellent and concise mechanical design, radar can be 360° unobstructed so that the robot has better results when following and navigating. In addition to SLAMTEC A1 standard and A2 radars, we can provide A1 customized radar. The scanning frequency of A1 customized version can be steplessly adjusted between 7-16HZ, equipped with radar switch
SLAMTEC RPLIDAR A2 Radar:
- Measuring radius: 16M
- 4CM ultra-thin appearance
- Measurement frequency: 8000/sec
- 5-year lifespan
- OPTMAG optical and magnetic fusion
7" Touch Screen and Optional Wireless Keyboard:
Through a touch screen and a wireless keyboard, the robot can be debugged anytime and anywhere. Through the touch screen and keyboard, you can directly turn on ROS, install software, configure or connect to wifi, which is convenient to operate. The wireless keyboard is equipped with the same touch board as a laptop, can replace the function of a mouse
Large Adjustable Camera Angle:
Whether it's line patrol, follow, visual slam, etc., the camera can be adjusted to a suitable angle, and the camera is placed on the front of the car without obstruction
Support Heightening, Free Customization, Free Drawing:
The size of the car can be modified for free, and the hole position can be customized for free. If you need to customize or buy the upper heightening board to increase the space of the car, please contact customer service
Newly Launched Bluetooth & WiFi Version APP:
1. Support gravity sensor remote control and two-hand button remote control mode
2. Support 5-channel waveform display interface, you can view the waveform at any time without a data cable
3. Support 9-channel parameter adjustment interface, support PID parameter online adjustment
4. Optimize electric quantity alarm mechanism, and the APP accurately pushes low-voltage alarm notifications
5. Support for BLE Bluetooth 4.0 module
6. Support the latest version for Android system
Video Tutorials and Development Manuals Provided:
Robot Function List (the following is a partial list of functions, equipped with corresponding tutorials):
* Low-level ROS serial communication
* Reserved CAN communication interface
* IMU and odometer data feedback
* Voltage detection and voltage alarm
* MPU9250 nine-axis attitude sensor
* Support serial port one-click download
* Gyro zero drift clearing
* Keyboard node control
* APP gravity sensor control
* APP adjusts PID parameters
* For opencv applications and tutorials
* Robot dynamic obstacle avoidance
* Robot fixed-point navigation and multi-point navigation
* TEB and DWA path planning
* ROS APP image transmission and control
* WEB browser displays camera image
* Radar mapping navigation
* Rtab pure visual mapping navigation
* Rtab vision + radar mapping navigation
* For Gmapping
* For Hector mapping
* For Karto build map
* For Cartographer
* For Tensorflow object recognition
* Sound source localization
* Voice call
* Voice control
* Voice navigation
* Radar follow
* Deep visual follow
* KCF follow
* AR tag recognition
* RGB visual line patrol (integrated radar obstacle avoidance)
* ROS APP mapping (NEW)
* ROS APP navigation (NEW)
* RRT autonomous mapping (NEW)
* Multi-robot formation (NEW)
Key Functions:
Rtab Map Vision and Lidar Mapping Navigation:
Support for visual SLAM, gmapping, hector, karto, Google Cartographer and other algorithms to create maps. Support fixed-point navigation, multi-point navigation
Laser Radar Follow:
Laser radar can follow all directions, and can follow any object including people
Depth Camera Follow:
Through the RGBD depth camera, you can measure the distance to the front object and follow
Visual Line Inspection:
The camera can be navigated by sticking lines. General electrical tape can be used, the color of the line can be blue, black, red, green, yellow, etc.
Support APP Control, View Images, Map Creation, Navigation:
When the APP is controlled, the camera image is displayed on the mobile phone at the same time, and the control is controlled from the first perspective
RRT Autonomous Exploration and Mapping:
No need to manually control the car, use the RRT algorithm to autonomously complete the exploration map, save the map, and return to the starting point
Multiple Robotic Car Formations:
Multiple robot cars work together, distributed formation control, support single-point and multi-point navigation functions
Wireless Controller For PS2:
* Mainboard reserved controller receiver socket for PS2
* You can use the controller for PS2 to control the speed and steering, and you can steplessly adjust the speed through the joystick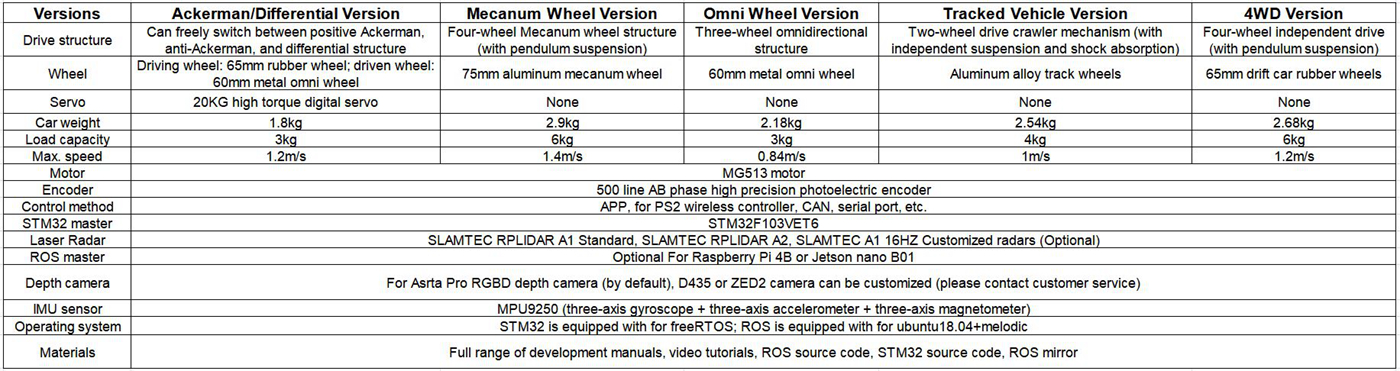
ROS Master Comparison & Purchase Advice:
Suggestions for ROS master control selection (basically the same, use the system for ubuntu):
1. Starters can buy ROS master for Raspberry Pi 4B 2GB or for Raspberry Pi 4B 4GB
2. For Jetson nano improves the GPU, which is a bit better than that for Raspberry Pi in image processing and simple deep learning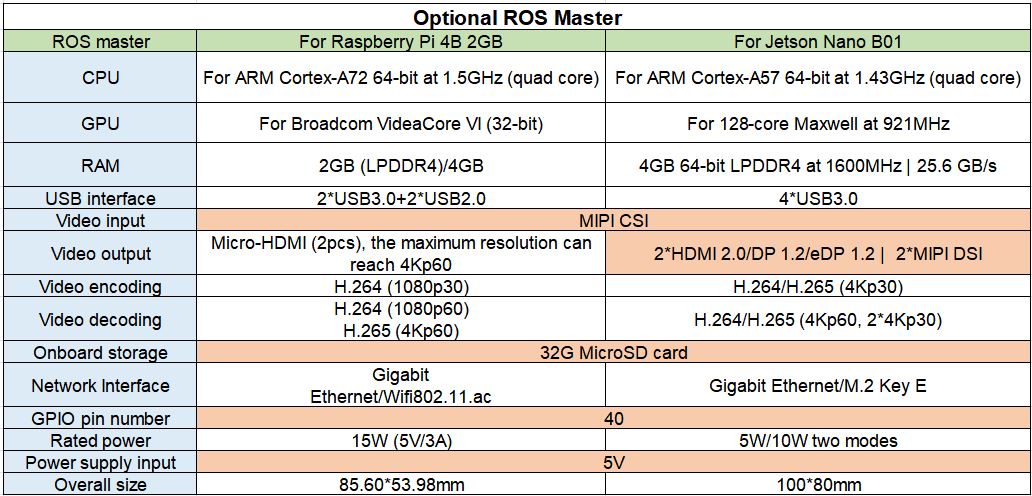
Attention:
- If you need a RK3399 nanopi ROS master made in China, please contact us.
Interface Description:
- CAN: The mobile platform can receive commands from CAN port, or send its own data (odometer and IMU) through the CAN port
- Serial port: The mobile platform can receive commands from serial port and send its own data (odometer and IMU) through the serial port
- USB interface: used to connect to a computer, download the program with one key, and receive the command control sent by the computer and send its own data (odometer and IMU) to the serial port
- Bluetooth (or wifi): can send its own information to APP, can receive APP remote control commands, can adjust PID parameters
- For PS2 interface: Provide socket for PS2 controller, provide code, plug and play
- SWD interface: Provide SWD interface for online debugging
Information Description:
1. The data is completely open source and supports secondary development
2. Provide ROS source code package, which can help you quickly connect the car to ROS system, and provide technical support for STM32, ROS, Linux, SLAM
3. Provide rich ROS development manual
4. Covers ROS basics, STM32 low-level control, ROS development, for UBUNTU tutorials, etc.
5. Provide for OpenCV starter and its application tutorial in ROS environment
6. Provide ROS basic video tutorial
7. Provide STM32 bottom source code and ROS communication video tutorial
8. Provide ROS-related basic tutorials for Ubuntu
9. Provide ROS function development code-level video tutorials
10. Provide ROS voice thematic video tutorials
11. Provide special video tutorials on motors, servo, PID, etc.
Mainboard:
- It can control up to 4 motors with encoders. One board can support the control of Ackerman, differential, mecanum wheel, omni wheel and other small cars. The mainboard reserves linear CCD and electromagnetic line patrol interface, which can expand the line patrol function.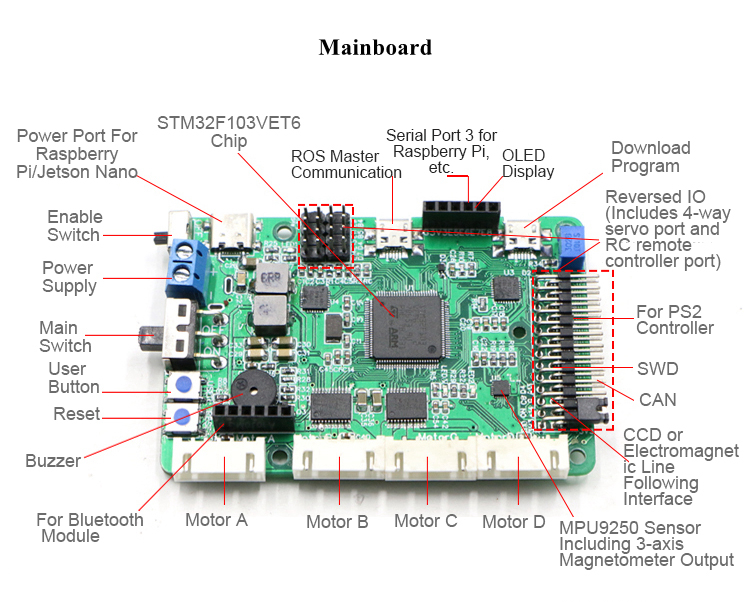
Bottom Master:
- Main control chip: 100-pin STM32, good expansion performance
- Model airplane remote control interface: support
- IMU chip: nine-axis MPU9250
- Download: serial port one-key download or SWD interface download
- 5V power supply: dual 5V5A
- CAN interface: reserved
- Linear CCD interface: reserved
- Electromagnetic line patrol interface: reserved
- GPIO reserved: dozens
Package Included:
4WD Version's Chassis:
- 4 x 12V30F MG513 motors
- 4 x 37 Motor brackets
- 4 x 65mm rubber wheels
- 4 x Hexagonal couplings
- 1 x Car aluminum alloy upper plate
- 1 x Car aluminum alloy bottom plate
- 1 x Set of pendulum suspension mechanism
- Several standard parts and their connecting parts
Electric Control Parts:
- 1 x STM32F103VET6 integrated mainboard
- 1 x Bluetooth module
- 1 x OLED display
- 1 x Charger
- 1 x Data download cable
ROS Parts:
- 1 x ROS master for Raspberry Pi 4B 4GB
- 1 x Laser radar SLAMTEC RPLIDAR A2
- 1 x Depth camera and angle adjustment mechanism
- 1 x 32G memory card and card reader
- 1 x For PS2 wireless controller
- 1 x Dual-fan heat sink (for Raspberry Pi only)
- Several cables
- 1 x Touch screen
Note:
- The circuit board, charger of different versions are the same. It is assembled and debugged before delivery. If you want an unassembled kit, please contact us.
- Voice module, touch screen and wireless keyboard are optional.
- The car can use APP or for PS2 controller by default.
- It is powered by a 12V 9800MAH polymer lithium battery which is not included.
- For more advanced A3 radar, ZED2 camera, D435 series camera and other accessories, please contact customer service.











