| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $54.78 | $53.66 | $51.99 | $49.75 | Contact US |
 Radiolink SE100 M10N GPS Module High Precision Positioning Module for Pixhawk FPV Flight Controller
$38.80
Radiolink SE100 M10N GPS Module High Precision Positioning Module for Pixhawk FPV Flight Controller
$38.80
 SKYDROID H12 PRO 12-Channel 2.4-2.483GHz FPV Remote Controller 6-10KM Wireless Control for FPV Racing Drones
$319.84
SKYDROID H12 PRO 12-Channel 2.4-2.483GHz FPV Remote Controller 6-10KM Wireless Control for FPV Racing Drones
$319.84
 GSM020 (GPS+GLONASS) GNSS Performance Analyzer Measures G-force Speed & Time for RC Cars and Planes
$80.16
GSM020 (GPS+GLONASS) GNSS Performance Analyzer Measures G-force Speed & Time for RC Cars and Planes
$80.16
APM 2.6 ARDUPILOT MEGA 2.6 Flight Control + APM 2.6 GPS-6M+HMC5883L Compass Module For FPV
Introduction:
- This is the new APM 2.6 autopilot module. The sensors are exactly the same as with APM2.5+, however this version does not have an onboard compass, which makes this version ideal for use with multicopters and rovers.
- The APM 2.6 is a complete open source autopilot system and the bestselling technology that won the prestigious 2012 Outback Challenge UAV competition. It allows the user to turn any fixed, rotary wing or multirotor vehicle (even cars and boats) into a fully autonomous vehicle; capable of performing programmed GPS missions with waypoints. Available with top or side connectors.
This revision of the board has no onboard compass, which is designed for vehicles (especially multicopters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference. (On fixed wing aircraft it's often easier to mount APM far enough away from the motors and ESCs to avoid magnetic interference, so this is not as critical, but APM 2.6 gives more flexibility in that positioning and is a good choice for them, too). This is designed to be used with the 3DR uBlox GPS with Compass (see option below), so that the GPS/Compass unit can be mounted further from noise sources than APM itself.
Features:
- Arduino Compatible!
- Can be ordered with top entry pins for attaching connectors vertically, or as side entry pins to slide your connectors in to either end horizontally
- Includes 3-axis gyro, accelerometer and magnetometer, along with a high-performance barometer
- Onboard 4 MegaByte Dataflash chip for automatic datalogging
- Optional off-board GPS, uBlox LEA-6H module with Compass.
- One of the first open source autopilot systems to use Invensense's 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively.
Resources:
- ArduPlane manual
- ArduCopter manual
- ArduRover manual
- Datasheets:
- MPU-6000, Six-Axis (Gyro + Accelerometer) MEMS MotionTracking.
- HMC5883L-TR, 3-Axis Digital Compass.
- MS5611, MEAS High Resolution Altimeter.
- Documentation:
- Installing GPS: Plane, Copter, Rover
- Dimensional drawing
- EAGLE files
- User Guide PDF
The 3DR uBlox GPS + Compass module currently works with APM:Plane, APM:Rover and the APM:Copter version 3.0.1 (it does not work with the current APM:Copter 2.9.1b and earlier
- Connecting to APM 2.6
3DR uBlox GPS with Onboard Compass is compatible with APM 2.6 and includes two cables: one 4-position cable and one 5-position-to-6-position cable. To connect the GPS module to APM 2.6, connect the GPS port to the APM GPS port using the 5-position-to-6-position cable (use the top-entry port, not the side-entry port), and connect the GPS MAG port to the APM I2C port using the 4-position cable.
Mounting the GPS Module
- This module permits the GPS to be mounted separately from the flight control module so that it can have the best clear (view) of the sky and allows the compass to be distanced from interfering magnetic fields. When mounting the GPS+Compass module:
- Place the module on the outside of your vehicle (in an elevated position if appropriate) with a clear view of the sky, as far as possible from the motors and ESCs, with the arrow facing forward.
Distance the module from DC power wiring and the batteries by at least several inches.
Place the module clear of nearby iron containing metallic objects. (Use nylon or non magnetic stainless steel hardware and nylon or aluminum standoffs to mount the module).
Twist power and ground wires where possible
Setup in Mission Planner
Note:If the GPS / Magnetometer board is mounted in its correct direction (arrow pointing forward) and the Flight controller board is also mounted right side up with its arrow pointing forward, the (COMPASS_ORIENT) parameter will need to be set to (Roll 180) or “8″ because the compass is upside down under the GPS modules antenna.
Start Mission Planner and connect your flight control board: APM or PX4 and select the “Connect” tab.
Select the “Hardware” tab, then select the left menu “Mandatory Hardware” tab and then select the “Compass” tab.
Select the down arrow in the compass orientation pull down item and select “ROTATION_ROLL_180″.
Note:If the Flight controller board is put in an alternate orientation, the Orientation (i.e. COMPASS_ORIENT parameter) should be set according to the gps’s attitude to the flight controller. So for example if both the Flight controller and the GPS+compass module were mounted on the bottom of the vehicle (a ridiculous example) then you would leave the Compass orientation as ROTATION_ROLL_180. If however you wanted to mount the GPS+Compass right-side-up you would pick Orientation “ROTATION_NONE” because the original rotation was Roll 180, then you add the compass rotation which is another roll 180 = Roll 360 = no rotation.
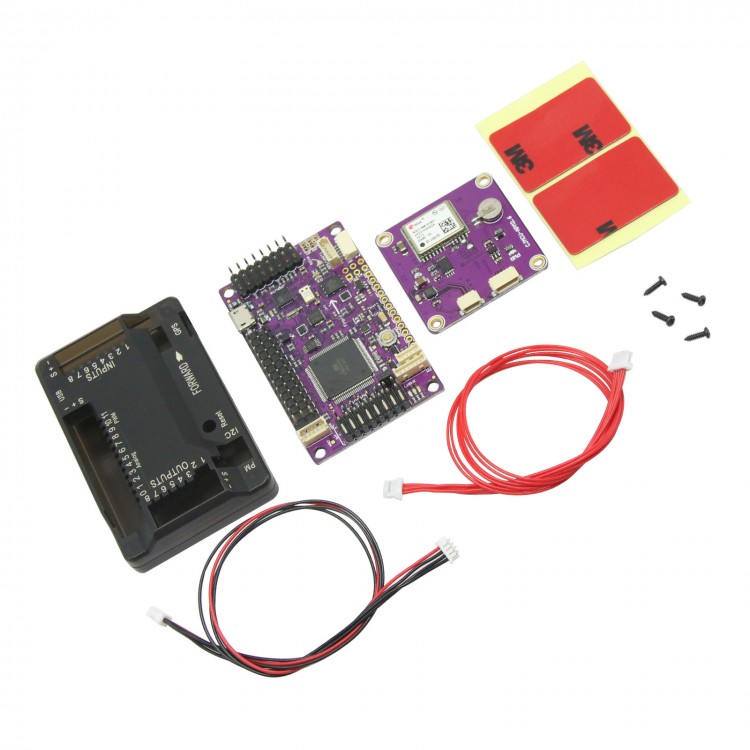
Package list:
- 1* APM2.6 flight control Board
- APM 2.6 GPS-6M+HMC5883L Compass Module
- 1* APM2.6 Protective case