| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $36.46 | $35.71 | $34.60 | $33.11 | Contact US |
 LILYGO Grey Shell Version T-Display-S3 1.9-inch LCD Display Development Board WiFi Bluetooth5.0 Wireless Module for Arduino
$32.47
LILYGO Grey Shell Version T-Display-S3 1.9-inch LCD Display Development Board WiFi Bluetooth5.0 Wireless Module for Arduino
$32.47
 Sketchboard Mechanical Arm Plotter Robot Arm Students Programming Learning DIY Kit for Arduino
$44.05
Sketchboard Mechanical Arm Plotter Robot Arm Students Programming Learning DIY Kit for Arduino
$44.05
 Ultrasonic Radar Programming Learning Kit MG90S Metal Gear Servo Motor Ultrasonic Detector 2 for Arduino DIY
$34.48
Ultrasonic Radar Programming Learning Kit MG90S Metal Gear Servo Motor Ultrasonic Detector 2 for Arduino DIY
$34.48
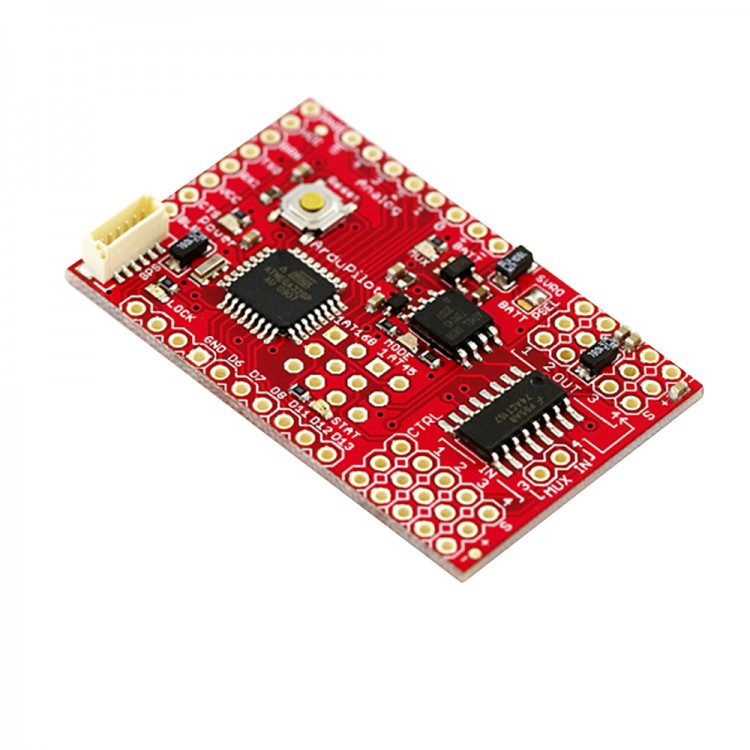
ArduPilot Arduino-Compatible UAV Controller w/ ATMega328 Sparkfun Imported
Description:
- This is a Arduino-compatible autopilot board designed by Chris Anderson and Jordi Muñoz of DIY Drones using the new ATMega328. This board was used to win the annual autonomous vehicle competition put on by SparkFun.
- ArduPilot is a fully programmable autopilot that requires a GPS module and infrared X, Y and Z rangefinders to create a functioning Unmanned Aerial Vehicle (UAV). The autopilot handles both stabilization and navigation, eliminating the need for a separate stabilization system. It also supports a "fly-by-wire" mode that can stabilize an aircraft when flying manually under RC control, making it easier and safer to fly. The hardware and software are all open source. The board comes with all the surface-mount parts already soldered, but requires the user to solder on connectors. Firmware is already loaded, but the autopilot software must be downloaded and loaded onto the board by the user. It can be programmed with the Arduino IDE. All details and instructions can be found at the project's home page.
- Other necessary elements, including aircraft recommendations, can be found at the project's home page.
Features:
- Controller designed to be used with autonomous aircraft, car or boat. Infrared sensor required only for aircraft.
- Based on a 16MHz Atmega328 processor. Total onboard processing power aprox 24 MIPS.
- Built-in hardware failsafe that uses a separate circuit (multiplexer chip and ATTiny processor) to transfer control from the RC system to the autopilot and back again. Includes ability to reboot the main processor in mid-flight.
- Multiple 3D waypoints (limited only by memory)
- Comes with a 6-pin GPS connector for the 1Hz EM406 GPS module.
- Has six spare analog inputs (with ADC on each) and six spare digital input/outputs to add additional sensors
- Supports addition of wireless downlink module for telemetry
- Can be powered by either the RC receiver or a separate battery
- Hardware-driven servo control, which means less processor overhead, tighter response and no jitters.
- Four RC-in channels (plus the autopilot on/off channel) can be processed by the autopilot.
- LEDs for power, failsafe status, autopilot status and GPS lock
- Dimensions: 30mm x 47mm







 32 bit ARM Flight Controller & 4G TF Card & Mega MinimOSD for RC Multicopter")



