| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $156.37 | $153.18 | $148.39 | $142.01 | Contact US |
 LILYGO Grey Shell Version T-Display-S3 1.9-inch LCD Display Development Board WiFi Bluetooth5.0 Wireless Module for Arduino
$32.47
LILYGO Grey Shell Version T-Display-S3 1.9-inch LCD Display Development Board WiFi Bluetooth5.0 Wireless Module for Arduino
$32.47
 Sketchboard Mechanical Arm Plotter Robot Arm Students Programming Learning DIY Kit for Arduino
$44.05
Sketchboard Mechanical Arm Plotter Robot Arm Students Programming Learning DIY Kit for Arduino
$44.05
 Ultrasonic Radar Programming Learning Kit MG90S Metal Gear Servo Motor Ultrasonic Detector 2 for Arduino DIY
$34.48
Ultrasonic Radar Programming Learning Kit MG90S Metal Gear Servo Motor Ultrasonic Detector 2 for Arduino DIY
$34.48
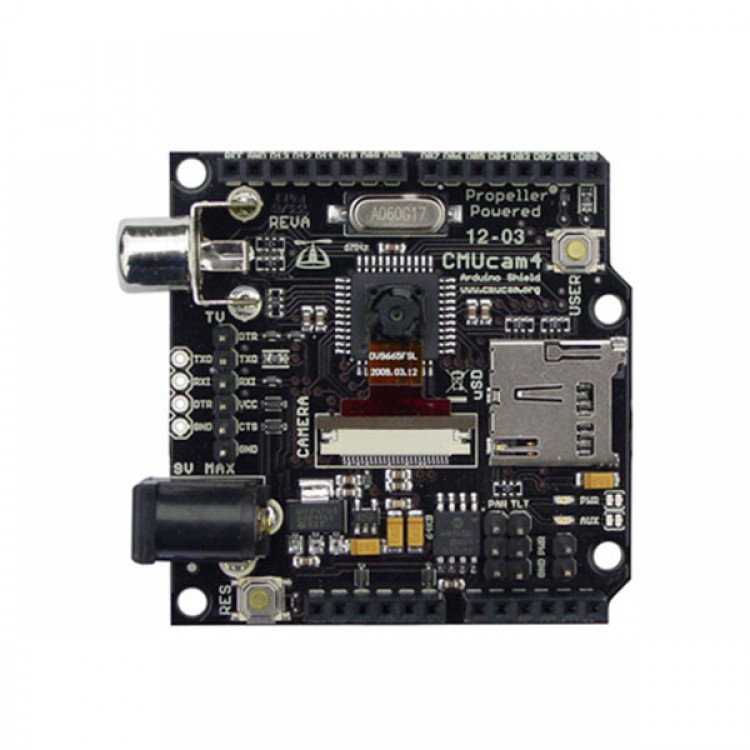
CMUCam4 Image Color Recognition Robot Vision Sensor for Arduino Compatible
Features
- Fully open source and re-programmable using the Propeller Tool
- Arduino Shield Compatible
- w/ Supporting Interface Libraries and Demo Applications for the Arduino and BASIC Stamp
- VGA resolution (640x480) RGB565/YUV655 color sensor
- Image processing rate of 10 frames per second
- Raw image dumps over serial or to flash card (640:320:160:80)x(480:240:120:60) image resolution
- RGB565/YUV655 color space
- Onboard Image Processing (QQVGA 160x120)
- Track user defined color blobs in the RGB/YUV color space
- Mean, median, mode and standard deviation data collection
- Segmented (thresholded) image acquisition for tracking visualization (over serial or to flash card) 80x60 image resolution
- Monochrome color space
- Histogram generation (up to 128 Bins)
- Arbitrary image clipping (windowing)
- μSD/μSDHC/μSDXC flash card slot with FAT16/32 full file system driver support w/ Directory and File manipulation
- I/O Interfaces
- Two-port servo controller (pan and tilt w/ 1us resolution at a 50 Hz refresh rate) Pan and/or Tit servo channels can be configured as GPIOs
- Indicator user controllable LED (red) and power LED (green)
- TTL UART (up to 115200 baud , 19200 baud by default)
- Monochrome baseband analog video output (NTSC/PAL) of 160x120 resolution for tracking visualization (segmented (thresholded) image w/ color centroid and bounding box overlay at 10 FPS)
- CMUcam4 GUI for viewing images on the PC.
- Comparable to a smart video sensor can recognize colors, the "CMUcam4" will enable (in association with your microcontroller) fun mobile robots capable of reacting with their environment in order to follow or avoid different objects. To do this it will suffice to your microcontroller (PIC ?, AVR ?, ARM ?, module PICBASIC, CUBLOC, Basic Stamp ?, Arduino ?, etc ...) to send (via its serial port) a sequence of ASCII commands corresponding actions that you will want it to do. For example, the commands:
- L1 -> turn on the LED of the "CMUcam4"
- L0 -> turn off the LED in the "CMUcam4"
- By the same principle, more complex orders can be sent to manage the detection of color indicating the "CMUcam4" the outer limits of the RGB components of the color you want to search. Therefore, each pixel of the image will be analyzed and compared with your values ??in order to return the coordinates of pixels are in the top left (x1, y1) and the most bottom right (x2, y2) that match your request. With your information microcontroller can locate the colored object and react accordingly. The "CMUcam4" recognizes nearly 70 commands.
Steering actuators
- The "CMUcam4" have 2 receiver pin for servos (not included). These actuators can be used to make a PAN and TILT movement to receive the "CMUcam4". The turret will then be automatically controlled by the "CMUcam4" to always move towards the center of the colored object. Please note that an external power source to power the actuators required.
Possible testing and communication via computer ?
- Note that the 6-pin male connector on this "CMUcam4" is specially designed to receive a cord USB serial optional (proposed below). This cable will not only feed the "CMUcam4" from the USB port of a computer, but also to test its capabilities back on the PC by sending commands through a simple series entry terminal (hyperterminal type or other) .
Control via optional LCD
- The video output of the RCA on the "CMUcam4" offers a great way to control (like a "debug" function). To do this, you will connect to a monitor or TV to NTSC (not included). To facilitate your development we offer a small LCD (optional) ideally designed for this function. More info about the LCDhere. Once the "CMUcam4" board is powered on, it will display a welcome screen (allowing you to ensure proper functioning of the whole setup).
- At this point, you have the option of following a manipulation on the two buttons of "CMUcam4" board and then enter "Test" mode. In this mode, the deck "CMUcam4" will analyze and store the color of the object that you present and then keep track of it. Also a rectangle of the perimeter of the object is to provide further guidance. If you place the "CMUcam4" on a pan and tilt device, it will ensure to always move towards the colored object that you have initially shown.
- If you remove the colored object, a message appears on the screen to tell you that no color similar to that stored is present in front of the camera lens.
- The photos above shows the detection and monitoring of a colored pencil which can even detect the indication written on it through the monitor!If you show by example the color of your skin to "CMUcam4" during the learning phase, it can then easily track the movement of your hand or your face in real time.