Tags: 12V to 24V Servo
| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $35.03 | $34.31 | $33.24 | $31.81 | Contact US |
 Dynamixel XL-Series Digital Servo Motor XL430-W250-T 1.5N.m Servo Motor Suitable for Robot Joints
$95.49
Dynamixel XL-Series Digital Servo Motor XL430-W250-T 1.5N.m Servo Motor Suitable for Robot Joints
$95.49
 DYNAMIXEL XC330-M288-T 0.930Nm Coreless Servo Motor w/ Metal Gear for LEAP Hand & Machine Learning
$160.99
DYNAMIXEL XC330-M288-T 0.930Nm Coreless Servo Motor w/ Metal Gear for LEAP Hand & Machine Learning
$160.99
 FPX330-H101 4PCS Set Servo Mounting Kit Exclusive Servo Hinge Frames and Idler Set for DYNAMIXEL X330
$28.42
FPX330-H101 4PCS Set Servo Mounting Kit Exclusive Servo Hinge Frames and Idler Set for DYNAMIXEL X330
$28.42

Parameters:
- Model:DS-SQ1.2AB360
- With Potentiometer: Yes
- Rotation:270 degree
- Rated voltage:24V
- Rated current:3A
- Speed:40rpm
- Working voltage:12-24V DC(Any voltage between 12V and 24V can work)
- Static current:2mA
- No-load current:150mA
- Gear material:steel
- Size:103x60x92mm
- Weight:528g
The max torque: 55kg/cm(12V)to 110kg/cm(24V)
Angle speed: 0.12s/60°,24V;0.24s/60°,12V.
Input mode: Pulse signal(remote control,multi-channel servo controller,singlechip) or analog voltage signal(potentiometer)
Voltage signal input range: 0V~+5V
Pulse signal input range: 0.5ms--2.5ms,for all "multi-channel servo controller,aircraft model remote control,SCM programming,Arduino"
The
servo rotates when the remote control is on neutral point(the servo
stops in neutral point),you can fine tun the trimmer potentiometer both
clockwise & counterclockwise below the drive board.
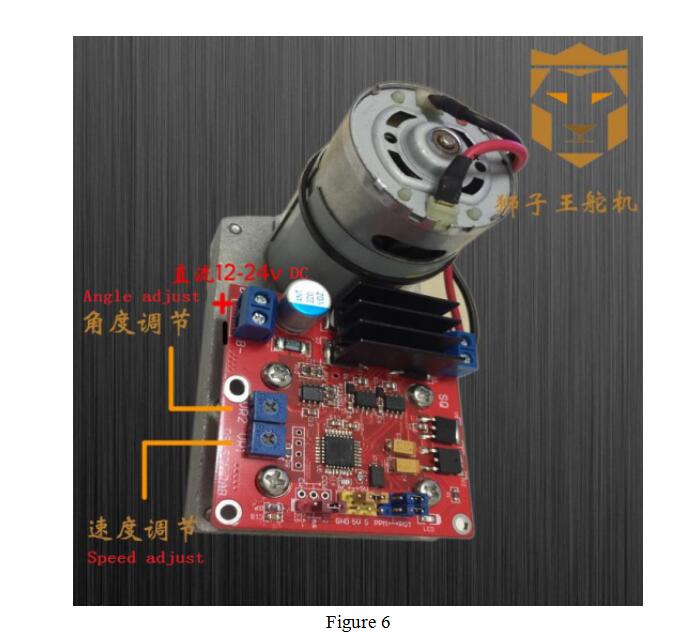
Application: middle/large size robot,mechanical arm and other large power large torque control areas.
Power supply input: 12V-24V DC(B- connects negative pole;B- connects positive pole)
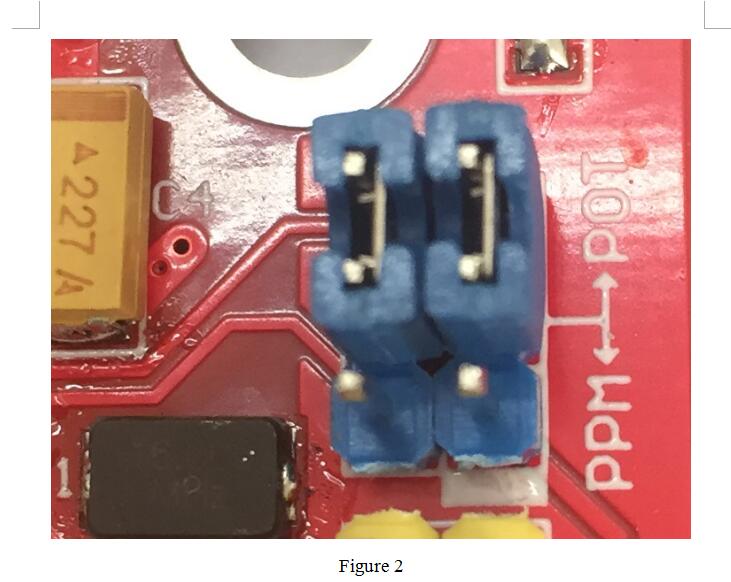
Mode select:
Jumper cap setting pulse signal input or analog voltage signal
input.PPM is pulse signal input,POT is analog voltage signal input.
PPM is pulse signal input,POT is analog voltage signal input.
Analog control mode: signal
is analog value.You can rotate potentiometer to control motor output
rotation and speed adjustment.(You can also adjust speed on VR1 trimmer
potentiometer in circuit board)
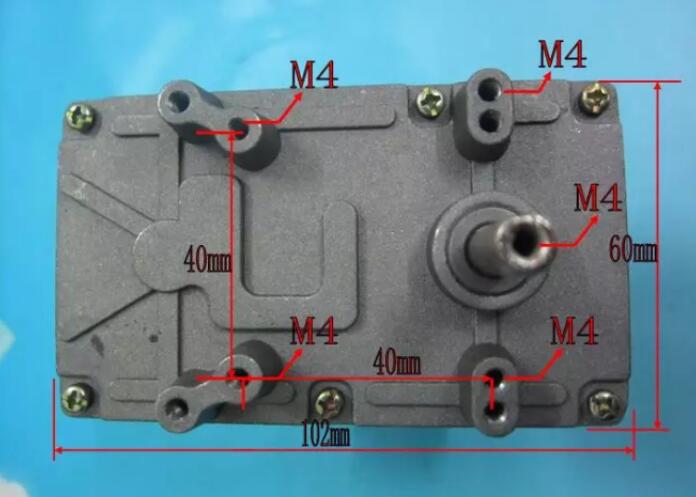
1.For volatge:12V-24V
2.Rotation speed:40-80rpm/min
3.Weight:500g
4.Box output shaft diameter:8mm
5.Full metal gear reduction motor
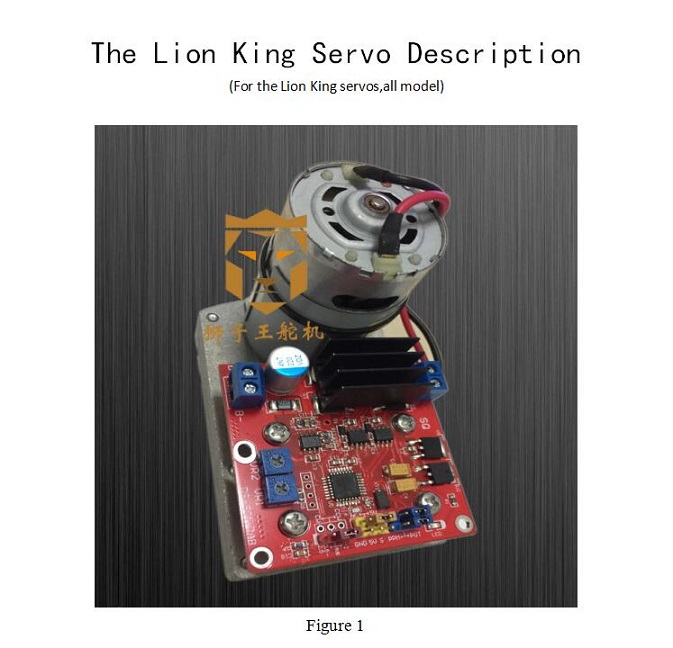
The Lion King Servo Description
(For the Lion King servos,all model)
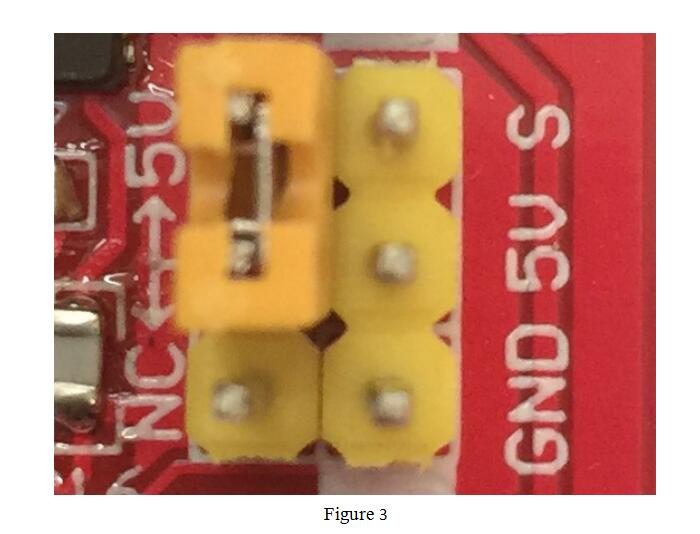
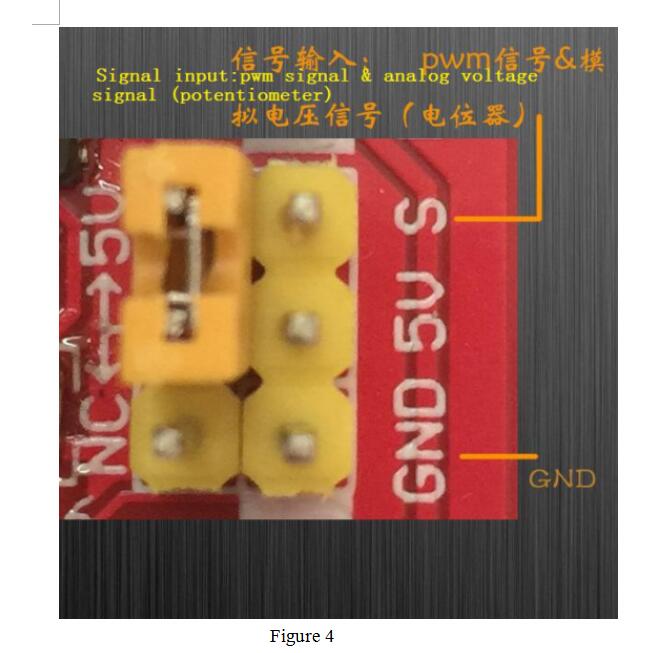
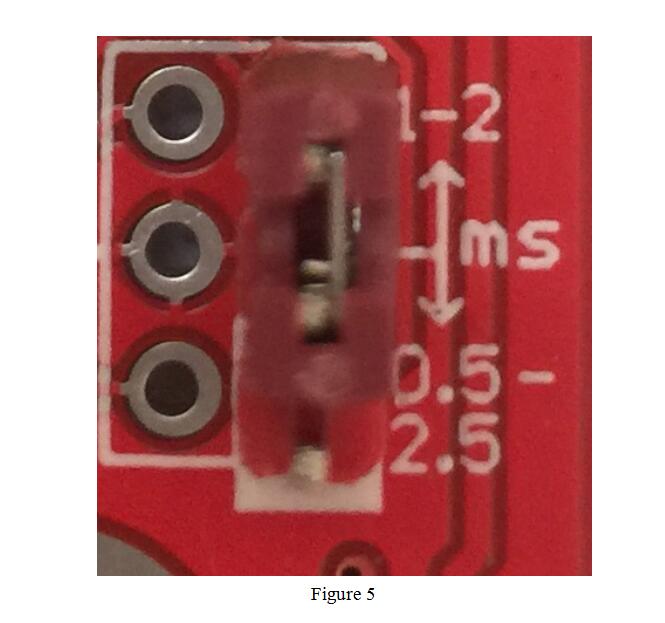
S interface is servo
controlled PWM signal input interface,can input cycle 20MS,50HZ,pulse
width is 1-2MS or 0.5-2.5MS standard servo control signal.If it can
control normal servo signal,it can control our super servo,DIY
servo.Please make sure the PWM signal is correct.
S interface is
used for connecting potentiometer and directly control motor
angle,potentiometer feet (which have resistance change) connect S
pin.The other two feet connect nearby two pins separately (exchange the
two feet next to the potentiometer,it changes).
For aeromodelling remote control receiver output PWM pulse width is 1-2MS.
If
use it in 0.5-2.5MS mode,the angle can not reach 270 degree.It can jump
to 1.0-2.0MS mode,evenif the pulse width is 1-2MS,the super servo the
max angle can get 270 degree.But the market servo controls vary,some are
0.5-2.5MS output;some are 0.5-2.1MS output.These control signal are
suggested to jump to 0.5-2.5MS mode.
0.5ms--2.5ms is suitable for multi-channel servo controller,some aeromodelling control,singlechip programming,“Arduino”.


















