| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $65.20 | $63.87 | $61.87 | $59.21 | Contact US |
 XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-200KG)
$168.45
XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-200KG)
$168.45
 XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-100KG)
$168.45
XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-100KG)
$168.45
 XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-50KG)
$157.09
XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-50KG)
$157.09
DGM V1.2 Motor Driver Board DC Motor Driver With Cables for Odrive MIT Single Motor FOC BLDC Servo
DGM Motor Driver Board:
DGM is a highly integrated and efficient brushless motor driver which is easy to use. It boasts open source firmware code).
Features:
- Integrated an absolute value magnetic encoder chip with a resolution of 14bit, so users do not need to calibrate motor encoder every time it is turned on
- Support motor cogging torque ripple compensation
- Support magnetic encoder and induction magnet concentricity offset compensation
- Support automatic measurement of motor related parameters, and generate appropriate current loop control gains according to motor parameters
- The driver can be configured and controlled using serial port or CAN bus
- Configure via CAN bus using dgm_tool debugging software
Specifications:
- Input voltage: 9~50V
- Continuous current: 30A
- Peak current: 60A
- PWM frequency: 25kHz
- Support motor type: three-phase brushless permanent magnet motor
- Encoder type: on-board magnetic encoder (resolution 14bit)
- Communication interface: UART and CAN
- Control mode: torque, speed, position and track position
Package Included:
- 1 x Set of Motor Driver Board
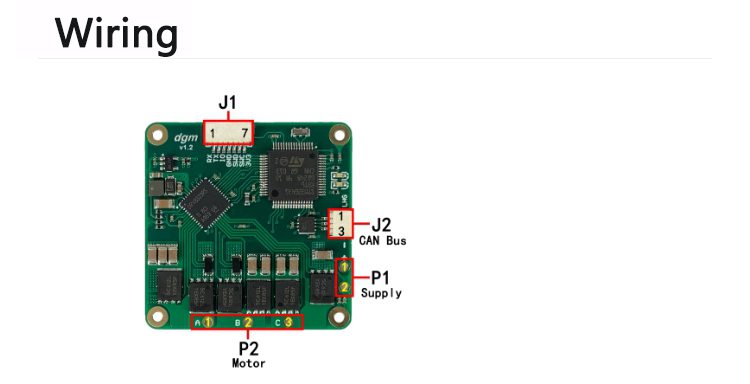
Power Supply:
2.2mm (outer diameter) 1.4mm (inner diameter) gold-plated pads, and the center spacing of adjacent pads is 4mm
Pin 1: Power supply -
Pin 2: Power supply+ (withstand voltage 9v~50v)
Motor P2:
2.2mm (outer diameter) 1.4mm (inner diameter) gold-plated pads, and the center distance between adjacent pads is 7.874mm
Pin 1: Motor Phase A
Pin 2: Motor Phase B
Pin 3: Motor Phase C
Debug Interface J1:
SH1.0 7P horizontal paste high temperature resistant terminal
Pin 1: Serial port RX
Pin 2: Serial TX
Pin 3: Spare IO
Pin 4: Digital signal ground
Pin 5: SWDIO
Pin 6: SWCLK
Pin 7: 3.3V
CAN Bus J2:
SH1.0 3P horizontal paste high temperature resistant terminal
Pin 1: Digital signal ground
Pin 2: CAN H
Pin 3: CAN L