| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $71.89 | $70.43 | $68.22 | $65.29 | Contact US |
 EMD600W Buck MPPT Solar Charging Controller 10V-30V Output Voltage Adjustable Controller with LCD Display IP65 Waterproof
$70.57
EMD600W Buck MPPT Solar Charging Controller 10V-30V Output Voltage Adjustable Controller with LCD Display IP65 Waterproof
$70.57
 1000W High Efficient Anti-reverse Solar Inverter MPPT Reflux Controller WiFi Cloud Monitoring Support APP Remote Control
$153.20
1000W High Efficient Anti-reverse Solar Inverter MPPT Reflux Controller WiFi Cloud Monitoring Support APP Remote Control
$153.20
 800W High Efficient Anti-reverse Solar Inverter MPPT Reflux Controller WiFi Cloud Monitoring Support APP Remote Control
$147.37
800W High Efficient Anti-reverse Solar Inverter MPPT Reflux Controller WiFi Cloud Monitoring Support APP Remote Control
$147.37
Dual Axis Solar Tracker Controller Automatic Solar Tracking System DIY With Remote Control
User Manual of XMYC-3 Solar Tracking Controller:
This
controller is a dual-axis sun tracking controller. It uses
high-precision inner and outer ring hole sensors to detect the direction
of sunlight. Users can analyzes and judges the sensor signal through
the single-chip microcomputer circuit on the controller. The
corresponding motor on the platform can be controlled through the relay
combination on the circuit board to perform the process of tracking the
sun. At the same time, you can lay it flat in case of wind (wind speed
sensor needs to be purchased), and it can return to the position on
cloudy days or nights. English LCD screen is used to display the
corresponding parameters, and the parameters can be set by the buttons
on the controller or the buttons of an infrared remote control (remote
control needs to be purchased).
This controller corresponding
platform required to be 2-axis platform, the drive motor of platform is
DC brush motor, the motor voltage is 12V or 24V, and current of single
motor must be less than 15A (each axis with a 10A fuse by default). Four
direction of platform all should have limit switch.
DC IN: 10-28V; DC OUT=DC IN; I MAX. <15A.
Main Components of the Tracking Controller:
1. Main controller:
Mounting
hole of the main controller is 4MM/0.2"; Hole space from left to right
is 174MM/6.9". Hole spacing from top to bottom is 60MM/2.4".
It
uses a waterproof box as the shell. When installed vertically, it is
rain-proof and has up to 6 waterproof outlets for line connection.
Terminals are used for wiring on the motherboard. The upper cover has an
on-screen display and six operation buttons, which are convenient for
users to view parameters and manually operate and set parameters.
2. Sunlight sensor:
It
has a unique deep-hole internal and external inspection method. Through
the shield of the pheasant cap in the middle, the voltage of sunlight
radiation generated in four directions is transmitted to the motherboard
through a 3-meter-long (9.8ft) 5-core cable. The sensor can be fastened
with two M6 bolts, 40mm/1.6" apart. It has a transparent cover and has a
certain protection against dust and rain.
3. Wind speed sensor (optional):
Wind
speed sensor is used to detect the wind speed of the environment. When
the wind speed reaches the protection value set by the controller, the
controller control platform will be driven to a position that can
shelter from the wind to protect the platform. The default wind speed
sensor has a cable 3 meter/9.8 ft in length. (If you want to configure
the wind speed sensor by yourself, a voltage signal type wind speed
sensor is needed)
4. IR remote control (optional):
Note: The remote control is powered by 2pcs AAA batteries which are not included in the package.
Functions of Controller Board: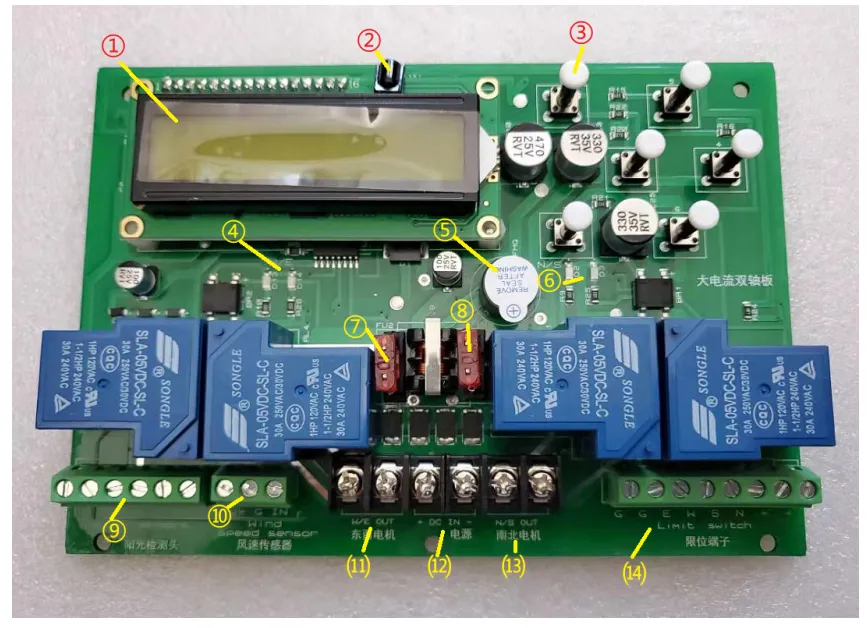
1. Display
2. Remote control receiver
3. Operation button
4. East and west axis output indicator light
5. Buzzer
6. South and north axis output indicator light
7. East-west axis fuse
8. South-north axis fuse
9. Sunlight sensor interface (from left to right: ground, east, west, south, north and +)
10. Wind speed sensor interface (from left to right: power supply V+, GND & signal input)
11. East-west axis motor interface
12. Power supply input (DC 12V or 24V. Left is positive end and the right is negative)
13. South-north axis motor interface
14. Limit terminal interface (from left to right: ground, ground, east, west, south, north, + and +)
Installation Method:
Installation of sunlight sensor:
Install
the sunlight sensor on the platform plane and follow the platform
movements. Note that it is parallel to the flat surface of the platform.
Note that it is parallel to the flat surface of the platform. When the
platform is erected, the outlet hole on the detection sensor should face
underground.
When installed in the northern hemisphere, the
detection sensor should be mounted on the east edge of the north side of
the platform as much as possible. When installed in the southern
hemisphere, the detection sensor should be mounted on the eastern edge
of the south side of the platform.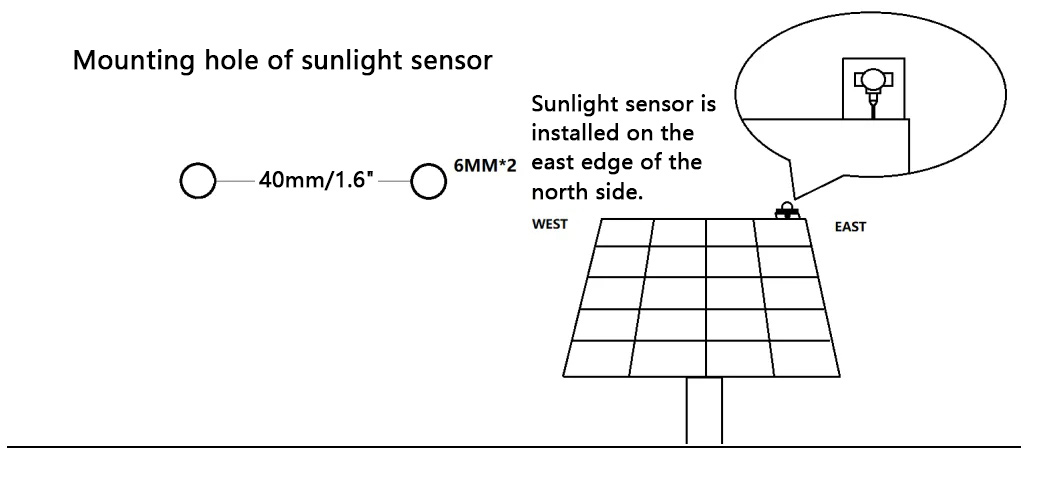
Installation of main controller:
The
main control box should be installed near the base post of the
platform, and does not need to move with the platform. Try to make sure
it's protected from rain, sun and other influences. The outlet hole
faces downwards to prevent rainwater from flowing in. The installation
should be located in a position which facilitates observation and
operation.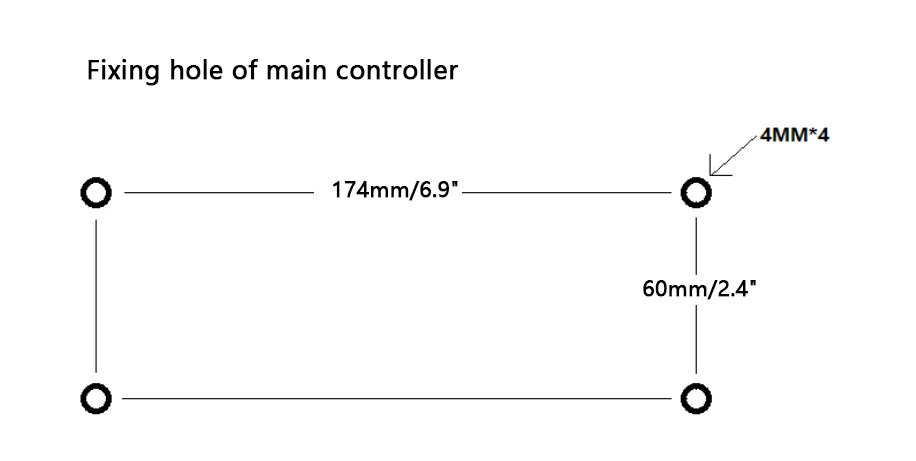
Installation of wind speed sensor:
-
The wind speed sensor should be installed near the platform, where it
can be effectively blown by the wind. Keep away from walls and floors. A
column can be used to support and mount the wind speed sensor.
- Wire the wind speed sensor to the main controller according to the mark, leaving room and installing it firmly.
-
The wiring method of the wind speed sensor: black wire with white
stripes to connect signal input IN, black wire to G, and V+ power supply
terminal disconnected.
- If you are using a wind speed sensor from
another manufacturers, distinguish the V+, - and signal cable. Wire
according to the instructions in the manual. The wind speed sensor
terminal V+ on this controller board is the power supply voltage
(12-24V). The signal output must be voltage type and the signal range
must be less than 5V.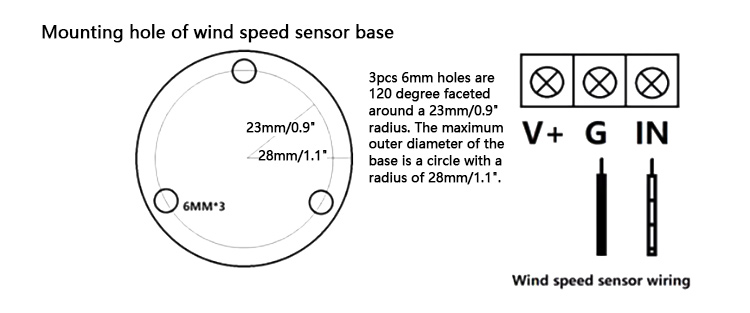
Wiring Method of Limit Switch:
Limit
switch is essential. There are A and B methods for position limit as
follows (limit switch needs to be purchased separately).
Method A:
External limit switch is used. The method of external position limit is
to adopt a micro switch with normally closed contact to arrange the four
positions that need to be limited on the platform, so as to directly
control the power supply circuit of the corresponding motor to achieve
the limit. As shown in the figure below: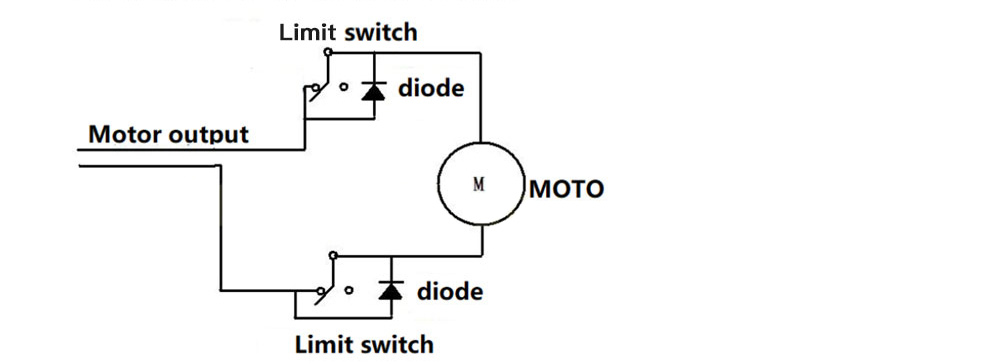
In
this way, it is necessary to pay attention to the sufficient carrying
current capacity of the limit switch and the diodes connected in
parallel. If a linear actuator with a limit is used, this method is not
required, because the linear actuator is equipped with method A limit
circuit.
Method B: If the limit signal is introduced into the
controller to achieve the limit, a limit switch with normally open
contacts is required. When a certain direction reaches the limit, the
switch is topped, and the switch will be closed and conducted, and the
ground (G) of the limit terminal is shorted with the terminal in the
corresponding direction, and the output in this direction will be
stopped.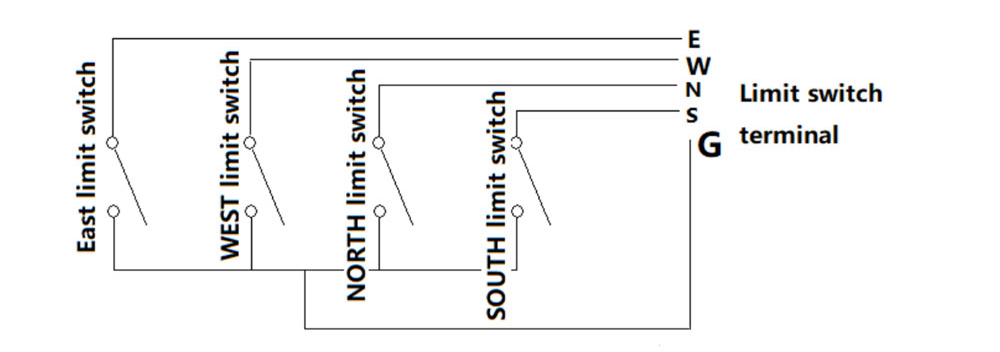
The
controller can also be connected to a three-wire NPN proximity switch.
When using this kind of switch as a limit, its power supply + end can be
connected to the + end of the limit terminal, and the other wiring is
the same as that of method B. Note that the top is the sensing area.
When there is metal within 5mm, it will output a limit signal.
In
the case of separate power supply without connecting to the controller
board, the two-axis drive motor should be able to drive the platform to
move smoothly within the corresponding range. In this case, the motor
can be connected to the motor terminal of the corresponding axis on the
control board. Wrong connection of east-west axis motor and north-south
axis motor should be avoided.
Running and Debugging:
After
confirming that the sunlight sensor, wind speed sensor, limit switch,
and two-axis motors are connected, a power supply can be connected to
the controller board for debugging. The power supply voltage is 12V or
24V (subject to the rated voltage of the motor used). The supply current
should be sufficient for the maximum current demand of the two motors.
Turn on the power, the buzzer will sound once, at this time the
controller should be powered to work, and the screen will display:
The
controller then will enter various states based on specific sensor
feedback parameters. But at this point, we should first test whether the
orientation of the motor is correct. So you have to do manual test
first. Press SET button once to enter the following MT page:
At
this time, buttons →/←/↓/↑ can control the platform to move
east/west/south/north respectively, and the screen will display E/W/S/N.
If the movement direction of the platform does not match the direction
of manual control, please switch the corresponding wiring. Test the full
range of activities of the platform with manual functions, including
the limit state function, and test it normally for subsequent work.
When
the platform is manually controlled, the corresponding output indicator
light on the controller board will be turned on. Press QUIT button to
exit the manual mode.
When the button is pressed, the screen
background light will be turned on and turned off after 10 seconds. If
you press the QUIT button for five seconds, you can turn the background
light on or off for a long time.
Parameter Settings:
After
making sure that the motor is wired correctly, we then go to the
parameter settings and perform the necessary checks and settings on some
parameters. In the non-manual control interface, press and hold the SET
button for 5 seconds and release it, and the device will enter the
parameter setting page. Note that the time parameter is in seconds. The
threshold value unit V is voltage volt.
Special note: In the
following parameter setting interface, you can switch parameter items by
pressing buttons →/←. Press the ↓/↑ button to add/subtract parameters.
Press and hold the buttons to quickly add/subtract parameters, and press
the QUIT button to exit and save the parameters. In order to facilitate
the understanding of the meaning of the parameters, the following
parameters are not expressed in order. Please check it by yourself while
setting.
V2/T3/T4/T5/T6/T7 (Wind speed protection related parameters):
When
the signal voltage from the wind speed sensor is higher than V2, it
will enter the wind speed protection control state, and the order is as
follows:
(1) Immediately drive the platform to the east T3 time, and at the same time, execute the platform to the north T5 time
(2)
Then the platform is executed to the west T4 time, and at the same
time, after the execution of T5 is completed, the platform is executed
to the south T6 time.
(3) After performing the above process, T7 is
the time to keep locking. During T7 time, the unit remains in standby
mode. If the wind speed continues to exceed the V2 value, the T7 time
will be full again.
(4) If the wind speed is lower than V2, it will
exit the wind speed protection state after the T7 time is over. If it is
cloudy during the T7 countdown after the wind speed protection action
is completed, the device will also be locked and will not exit the wind
speed protection state. The maximum parameter value can be set to 999
and the minimum parameter value can be set to 1. By setting the above
parameters reasonably, the platform can be executed to the angle and
position desired by the user when the wind speed exceeds the limit. The
default configuration of the wind speed sensor signal voltage and wind
speed conversion formula: V*25=m/s; V*25=m/s。
For example, the
F-number displayed by the wind speed sensor = 0.2 means that the current
wind speed is about 5 m/s. If the V2 value is set to 0.18, the wind
speed threshold is set to 4.5 m/s.
V1/V3/T13/TX/TY parameters:
When
the voltage detected by the sunlight sensor in either direction is
higher than V3, it will judge that the weather is sunny and it will be
timed. If the time that is continuously higher than V3 reaches the T13
time (seconds), it will enter the sunny tracking state. The controller
controls the action of each axis motor to align with the sun. V1 is the
tracking accuracy, and the smaller the value, the higher the accuracy.
However, the mechanical accuracy of the platform is required to reach a
certain level. The significance of the TX/TY parameter is that in the
process of automatic tracking of the sun, when aiming at the sun, an
intermittent time is set to avoid the frequent repetition of the
tracking caused by small light changes. That is, after aligning with the
sun, the axis enters a sleep time. And then it will re-detect the
position of the sun for tracking. The sun also moves very slowly, so
setting intervals can also save electricity.
TX: When the east-west axis is aligned, TX is the intermittent waiting time for entry.
TY: When the north-south axis is aligned, TY is the intermittent waiting time for entry.
By setting the above parameters reasonably, you can ensure that the controller can track quickly and accurately on sunny days.
T8/T9/T10/T11/T12 (platform homing parameter setting on cloudy day or at night):
When
the voltage in any direction detected by the sunlight detector is lower
than V3, the sunlight is judged to be weak. At this point, it will
sleep in place and enter the T18 countdown (seconds). During the
countdown time, if the sunlight value has not returned above V3, after
the countdown ends, it will perform a homing action in the following
order:
(1) Run T9 time to the east, and at the same time, run T11 time to the north.
(2) Then execute the T10 time to the west. After the execution of T11 is completed, the T12 time to the south will be executed.
T8
can be set to a maximum of 9990, and other parameter values can be set
to a maximum of 999 and a minimum of 1. By setting the above parameters
reasonably, the platform can be assigned to the angle or position
desired by the user when there is weak sunshine or at night.
After the parameter setting is complete, press the QUIT button to exit and save the parameters.
Logical sequence in which the devices work automatically:
After
the device is powered on, the controller will automatically control the
data transmitted by the sensor. It is divided into the following cases:
SH:
If the voltage detected by the sunlight sensor in any direction is
higher than V3, it will enter the sunny day automatic tracking state
after accumulating the time set by the timer T13 parameter:
In
this state, the controller compares the voltages on the east and west
sides and the north and south sides of sunlight sensor to control the
platform. When an axis is aligned, it will enter the TX/TY intermittent
waiting time. After this time countdown is over, the controller will
compare and control again, enabling the tracking process.
SL: When the voltage detected by the sunlight sensor in any direction is lower than V3, it will enter a cloudy or night state:
First,
it goes into the T8 delay. In T8 time, if the voltage is higher than
V3, it will exit this state. If the time that continues to be lower than
V3 reaches the T8 time, the prescribed action is executed:
After the
east T9 time, the west T10 time is executed, and the north T11 time is
executed, and then the south T12 time is executed. In this state, the
buzzer will sound at a certain frequency to alert. When the action is
finished, it will enter the state of waiting for sunlight.
FS: When the wind speed detected by the wind speed sensor is higher than V2, it will enter the wind speed homing state:
When
the signal voltage of the wind speed sensor is higher than the set V2
and lasts for 3 seconds, the wind speed is judged to be overrun, and the
controller performs the wind speed homing action in the following
order:
T3 time to the east, then T4 time to the west, T5 time to the
north, and then T6 time to the south. In this state, the buzzer will
sound at a certain frequency to alert.
Once the execution is
complete, it goes into T7 locking countdown. During the countdown time,
if the signal voltage of the wind speed sensor exceeds V2 again, the T7
countdown will be re-timed and it will be locked again. If it's cloudy
at this time, it will be locked until sunlight returns.
In the
above working state, the screen can display various parameters
alternately through buttons →/←: the voltage of the sunshine sensor in
the east, west, north and south, the signal voltage of the wind speed
sensor, the current power supply voltage, etc.
Regarding night homing and windy homing, the sequence logic is as follows:
T9 or T3 to the east and then T10 or T4 to the west: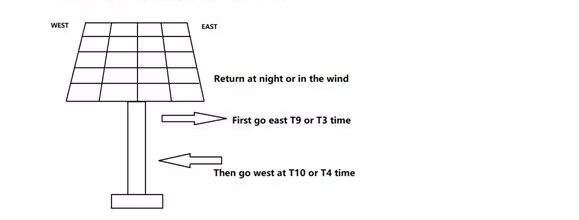
T11 or T5 to the north, T12 or T6 to the south: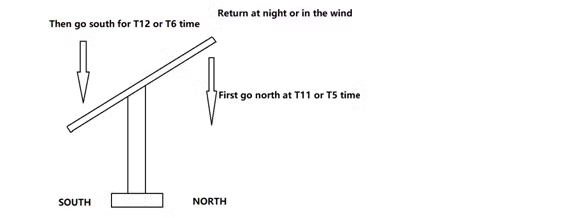
Explanation of the Parameters of LCD screen:
AT: Automatic tracking status. In this state, the device will automatically track the sun.
TX:
It is a waiting period when the east-west axis is aligned in the
automatic-tracking state. During the period, the device will not
operate. Recommendation: 100
TY: It is a waiting period when the
north-south axis of the automatic-tracking status is aligned. During the
period, the device will not operate. Recommendation: 100
E: East; W: West; S: South; N: North (indicates that the device moves in the corresponding direction)
V: The real-time voltage of power supply.
FS: Wind speed exceeds the set value and it will enter the state of leveling and homing when encountering wind.
FSLOCK: The locked state after the wind speed is reset.
F: Real-time wind speed voltage. The unit is V.
SH: Automatic tracking on sunny days.
MT:
Manual operation status. In this state, the 1/2/3/4 buttons of the
remote control correspond to manual movement in the
north/south/west/east direction.
SL: Weak sunshine. The device will go to sleep and wait for the sunlight to appear again.
T3:
The time value in seconds for the device to drive eastward when
executing the specified action of wind speed exceeding the limit. The
unit is seconds. (Recommended setting value: the time taken by the platform from east to west * 1.2 times)
T4:
When performing the specified action of exceeding the wind speed limit,
it is the time value of the drive device to the west after T3. The unit
is seconds. (Recommended setting: The time it
takes for the platform to move from west to east to the east-west axis
posture you want the platform to perform)
T5: When
performing the specified action of exceeding the wind speed limit, it is
the time value of the device to drive north. The unit is seconds. (Recommended setting value: the time taken by the platform from south to north * 1.2 times)
T6:
When performing the specified action of exceeding the wind speed limit,
T6 is the time value for driving device to the south after T5 time. The
unit is seconds. (Recommended setting: the
time it takes for the platform to move from north to south to the
north-south axis attitude you want the platform to perform)
T7:
After performing the specified action of exceeding the wind speed
limit, T7 is the self-locking time of the controller. This function is
to prevent the wind speed effect from being intermittent and causing the
unit to perform frequent tracking. During the self-locking time, if the
wind speed exceeds the value again, the time will be immediately
re-timed, so that the device does not operate frequently. The unit is
seconds. (Recommended setting: 600)
T8: Delay value of weak sunlight duration. (Recommended setting: 1800)
T9:
When performing a specified action with weak sunlight, T9 is the time
value for the device to drive eastward. The unit is seconds. (Recommended setting value: the time taken by the platform from east to west * 1.2 times)
T10:
When performing a specified action with weak sunlight, T10 is the time
value for the device to drive to the west after T9. The unit is seconds.
(Recommended setting: The time it takes for
the platform to move from west to east to the east-west axis posture you
want the platform to perform)
T11: It is the time for the device to drive north when performing a specified action with weak sunlight. The unit is seconds. (Recommended setting value: the time taken by the platform from south to north * 1.2 times)
T12:
It is the time for the for the device to drive to the south after T11
when performing the specified action in weak sunlight. The unit is
seconds. (Recommended setting: the time it
takes for the platform to move from north to south to the north-south
axis attitude you want the platform to perform)
T13: It is the set continuous delay time for sunlight recovery after the occurrence of weak sunlight. The unit is seconds. (Recommended setting: 10)
V1:
Tracking accuracy setting. This value is the voltage value of the
tracking accuracy range. When the voltages detected in the east/west and
south/north differ by V, the controller believes that the device needs
to be moved or aimed at the sun. The smaller the value, the higher the
accuracy, and vice versa. It needs to be set according to the
characteristics of the platform (Recommended value: 0.06)
V2:
Wind speed control voltage. This value is the threshold set by the
controller. When the voltage output by the wind speed sensor is higher
than this value, the controller deems it necessary to immediately
prescribe action to protect the platform (Recommended
setting value: The parameter corresponding table of the wind speed
sensor shall prevail. The recommended setting value of the sensor
configured by our company is 0.15)
V3: Weak sunshine
control voltage. It is the threshold value set by the controller. When
none of the voltages in the four directions of the sunlight sensor is
higher than this value, the controller thinks that the current sunlight
is weak and has no power generation value, and cancels tracking. If the
device is still tracking the sun on cloudy days, you can turn this value
up appropriately so that the controller can judge that it is cloudy. (Recommended setting: 1.80)
Attention:
1. When debugging and operating the platform, personnel should stay away from the platform to avoid accidental injury.
2. Avoid installing, inspecting or debugging equipment during thunderstorms.
3. When wiring, the power supply should be disconnected to avoid short circuit damage to the equipment.
4.
The controller should be installed in a location that is protected from
the sun and rain and is not easy to be disturbed. The outlet hole is
installed facing downward.
5. If the fuse is blown out, it means that
the motor may have a high current. A detailed inspection is required
before reusing this device.
6. Regularly inspect the sunlight sensor for dirt and for accidental movement.
7. Manually rotate the wind speed sensor regularly for 5 seconds to observe whether the wind speed protection action is normal.
8.
When the power supply is insufficient, the controller will restart as
soon as the motor outputs. At this time, you should check whether the
power supply is insufficient or the motor output is overloaded.
9.
When there is smoke and odor, the controller may be irreversibly
damaged. Power supply should be cut off immediately, discontinued, and
technical support should be sought.
10. When installing outdoors, be
sure to pay attention to the upper and lower covers, which should be
installed tightly and not leaking. Be careful not to poke the seal off.
Our company reserves the right to change the hardware and software design of this controller without prior notice.
Package Included:
- 1 x Main Controller + Sunshine Sensor
- 1 x Remote Control
Note:
- The wind speed sensor pictured is not included, for demonstration purposes only. Thank you for your understanding!
- Batteries are not included. 2pcs AAA batteries are needed for the remote control.


















