| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $267.33 | $261.88 | $253.69 | $242.78 | Contact US |
 High Torque RC Digital Servo Motor DC12V 24V 180kg.cm Steel Gear for Robot Mechanical Arm ASMC-05B
$41.77
High Torque RC Digital Servo Motor DC12V 24V 180kg.cm Steel Gear for Robot Mechanical Arm ASMC-05B
$41.77
 DM10010L MIT Driving Brushless Servo Robot Joint Motor 120NM Built-in Dual Encoder with USB-CAN Adapter for Humanoid Robots
$274.40
DM10010L MIT Driving Brushless Servo Robot Joint Motor 120NM Built-in Dual Encoder with USB-CAN Adapter for Humanoid Robots
$274.40
 DM10010L MIT Driving Brushless Servo Robot Joint Motor 120NM Built-in Dual Encoder for Humanoid Robots
$266.62
DM10010L MIT Driving Brushless Servo Robot Joint Motor 120NM Built-in Dual Encoder for Humanoid Robots
$266.62
FEETECH SM120BL 120KG Bus Servo High Torque Servo (Protocol for Modbus-RTU) + URT-1 Debugger Board
Features:
- 24V 120KG RS485 high torque servo, brushless one, with steel gears.
- Integrated structure: Reduction gear + drive motor + sensor + control board + bus communication. New concept power execution module is developed based on high reliability, scalability and basic functions.
- Can be installed at any angle. When you install it to your device, you don't need to look for an intermediate location. It supports installation at any angle. After installation, it can compensated to your specified position by position correction. This reduces installation links, reduces error rates, improves mass production efficiency and reduces labor maintenance costs. Parameters can be tuned by software for FD.
- Multi-turn large angle: At the highest angular resolution, the servo can achieve plus or minus 7 revolutions. Adjusting the angular resolution enables a rotation of plus or minus 10+ turns. (Note: parameters of multiple turns cannot be saved when there is power failure.) This enables more scenario applications. And the modular design can shorten the development cycle.
- Parameter feedback and multi-layered protection: The bus servo has the following parameter feedback mechanisms: temperature, load, speed, current, voltage, position, over-temperature, overload, over-voltage and over-current protection. With the software, you can monitor parameter changes in real time. While the device is running, you can dynamically monitor changes in the data. When the internal and external environment changes (such as torque overrun, stall, temperature overrun, etc.), it will make the protection mechanism worked, thereby protecting the servo itself. The closed-loop design facilitates dynamic monitoring, protects the servo itself, and prolongs life.
- Open PID motor parameter debugging: SM120BL adopts high-precision brushless motor and open PID to debug motor motion effects, such as motor motion hardness, static error compensation, overshoot and other ways. It can achieve a motor motion effect that is more in line with the set.
- Magnetic encoder sensors: 12-bit high-precision sensors are used to measure position
- High resolution: non-contact absolute 12-bit encoder (360° 0.088°)
- Serial bus type: support serial bus daisy connection and 254 ID addresses to choose
- Position servo control mode: can rotate 0~360° and multi-turn at any absolute angle
- Speed control mode: constant speed control of continuous rotation in the forward and reverse directions, with wide speed regulation range
- PWM control mode: can output constant force to achieve forward and reverse direction control
Functional Application:
- Switching device
- Traction mechanism
- Clamping device
- Educational DIY
- Robotic joints
- Bezel device
- Multi-turn turns
- Point control device
- Steering mechanism
- Wheel mode
- Lifting device
- Robotic arm joints
Service Support:
- Provide software for debugging
- Provide 3D drawings
- Offer communication protocol
Application Industries:
- Logistics: transport equipment, shuttles, etc.
- Medical equipment: cell sorter, mechanical surgical arms, etc.
- Smart home: movable cameras, smart toilets, etc.
- Robotics: robot joints, robotic arms, etc.
- Military field: gun target steering, rover and the like
- Intelligent equipment: intelligent storage, manufacturing machines, etc.
Specifications:
- Servo model: SM120BL
- Dimensions: 78 x 43 x 65.5mm/3.1 x 1.7 x 2.6"
- Operating voltage: 24V
- Operating temperature: -20°C to 60°C
- Quiescent current: 40mA at 24V
- No-load current: 200mA at 24V
- Stall current: 4000mA
- Stall torque: 120kg.cm (12N.m) at 24V
- Position range: -360°*7 to 360°*7
- Position resolution: 360°/4096
- Weight: 485g/1.1lb
- Sensor: 12-bit high-precision magnetic encoder
- Baud rate: 38400~1000000Bps
- Control frequency: 333Hz
- Position resolution: 0.088°
- Swing arm: stainless steel
- Maximum speed: 50RPM at 24V
- Rated torque: ≤ 32kg.cm (4N.m) at 24V
- Control mode: position mode/motor mode/step mode
- Feedback parameters: load/position/speed/input voltage/current/temperature
Attention:
(1) At quiescent operating current, the SM120BL servo is energized, but it does not move.
(2) Under the condition of no-load current operation, the SM120BL servo moves.
(3) In the case of locked-rotor current operation, this is the current of the SM120BL servo when the maximum torque is output.
(4) The baud rate can be modified to 500K, 250K, 128000, 115200, 76800, 57600 and 38400.
(5) The actual maximum number of bus nodes available depends on power supply capacity and the allowable current specification of the cable. It is recommended that 8 groups of servos be equipped with one group of power supply.
(6) The stall torque is the maximum stall torque of the servo. The actual working torque is selected as 1/3-1/5 of this value as the suitable working point.
Development Environment:
- Can be developed in environments for Arduino/STM32/PC/JAVA/C++/C#
- Communication protocol, memory table, serial port debugging assistant and other information can be provided
Package Included:
- 1 x Servo with Cable
- 1 x User Manual
- 1 x URT-1 Debugger Board
- 1 x USB Cable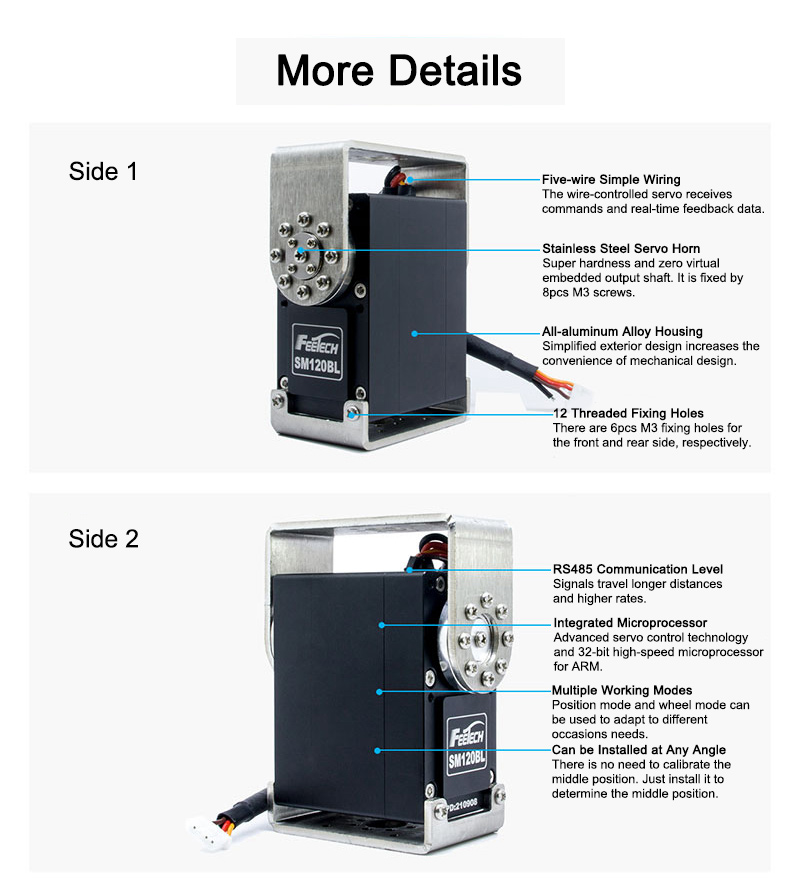






 + URT-1 Debugger Board")
 + URT-1 Debugger Board")
 + URT-1 Debugger Board")
 + URT-1 Debugger Board")
 + URT-1 Debugger Board")

")

")
 w/ URT-1 Debugger Board")
 with URT-1 Debugger Board")


