| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $104.53 | $102.39 | $99.19 | $94.93 | Contact US |
 LEFEIRC SNL+ Plus Flight Control Support AAT Automatic Return for DJI O3 Air Unit Walksnail Avatar
$73.93
LEFEIRC SNL+ Plus Flight Control Support AAT Automatic Return for DJI O3 Air Unit Walksnail Avatar
$73.93
 Radiolink SE100 M10N GPS Module High Precision Positioning Module for Pixhawk FPV Flight Controller
$38.80
Radiolink SE100 M10N GPS Module High Precision Positioning Module for Pixhawk FPV Flight Controller
$38.80
 SKYDROID H12 PRO 12-Channel 2.4-2.483GHz FPV Remote Controller 6-10KM Wireless Control for FPV Racing Drones
$319.84
SKYDROID H12 PRO 12-Channel 2.4-2.483GHz FPV Remote Controller 6-10KM Wireless Control for FPV Racing Drones
$319.84
Flight Controller For Pixhawk 2.4.8 Simple Version Without GPS Suitable For 4-Axis Multi-Rotor Drones
Read Before Purchasing:
- If the flight controller needs to automatically return to the origin and land at low voltage, it needs to be equipped with an ammeter (packages with ammeters can be purchased)
- The damping plate is used for flight control and damping. Increase the stability, make the fixed height more stable, filter the vibration of the body
- The bracket is a GPS support bracket, foldable, supports GPS fixation, and avoids interference by the body circuit
- PPM decoder board: when some remote controllers do not support PPM or SBUS, PPM decoder board is needed to convert ordinary receivers into PPM
Flight Controller For PIXHAWK 2.4.8:
It adopts a flight controller for PIXHAWK 2.4.8. It is a new generation of flight control system. Its predecessor is APM flight control. As the processor of APM flight control is close to full load, there is no way to meet more complex calculation processing, so the hardware manufacturer uses the current 32-bit processor with high performance. All hardware of flight control for PIXHAWK is transparent and open source. All its buses and peripherals are derived, which can not only be compatible with some peripherals, but also provide convenience for users for further development. For PIXHAWK is a dual-processor flight controller, a 32-bit STM32F427 for Cortex M4 core 168MHz/256KBRAM/2MB Flash processor is good at powerful computing. And a 32bit STM32F 103 co-processor is mainly targeted for industrial use. Its characteristic is safety and stability. So even if the main processor crashes, there is a co-processor to ensure safety.
Simple Version for Pixhawk 2.4.8 Flight Controller:
Including a flight controller for Pixhawk 2.4.8, a safety switch, a buzzer, a set of I2C expansion board, and sandwich rubber.
Product Details:
Processor:
- Main processor: 32-bit STM32F427 for Cortex M4 core and FPU 168MHz / 256KB RAM / 2MB flash memory
- Coprocessor: 32-bit STM32F103 fail-safe coprocessor
Sensor:
- For ST Micro L3GD20 3-axis 16-bit gyroscope
- For ST Micro LSM303D 3-axis 14-bit accelerometer/magnetometer
- For Invensense MPU 6000 3-axis accelerometer/gyro
- For MEAS MS5611 Barometer
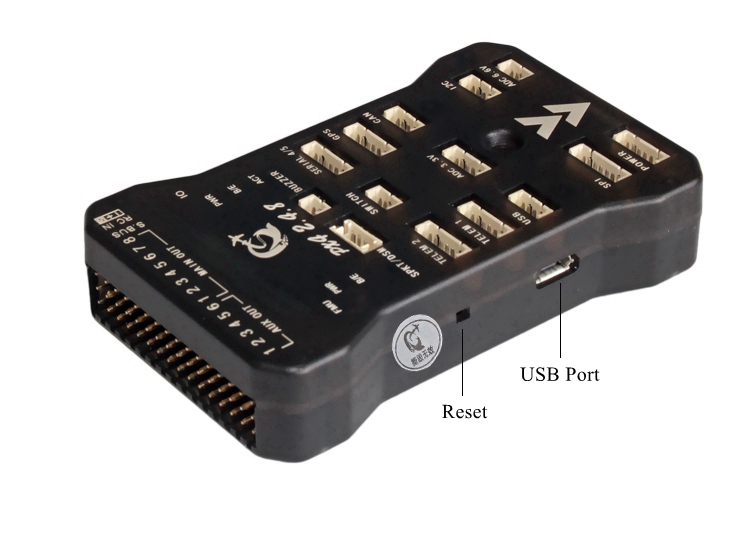
Interfaces:
- 5 UARTs (serial ports), one high power, 2 hardware flow control
- 2xCAN
- Support for Spektrum DSM/DSM2/DSM-X Satellite and DX8 compatible input (DX9 and later versions are not supported)
- Support S.BUS input and output
- Support PPM input
- Support RSSI (PWM or voltage) input
- Support I2C
- Support SPI
- 3.3 and 6.6V ADC input
- External microUSB port
Power Systems:
- Automatic diode control after power failure (uninterrupted power supply)
- Support maximum 10V servo power supply and maximum 10A power consumption
- All peripheral outputs are protected against overcurrent
- All inputs are ESD protected
Ground Station:
- For QGroundControl, MissionPlanner
Firmware:
- Support for PX4 and Ardupilot firmware for V, 2V3
Features:
1. Advanced 32-bit high-performance processor for ARM cortex M4, which can run RTOS real-time operating system for Nuttx
2. 14pcs PWM/Servo output
3. Bus interface (UART, I2C, SPI, CAN)
4. Integrated backup power supply and failed backup controller, which can safely switch to the backup controller when the main controller fails
5. Provide automatic and manual modes
6. Provide redundant power input and failover function
7. Multi-color LED lights
8. Provide multi-tone buzzer interface
9. Micro SD records flight data, (trajectory, sensor, position, altitude, power and all other data)
10. Support optical flow sensor, perfect indoor fixed height and fixed point
11. Support ultrasonic. Ultra-low altitude can not drop high, ultrasonic multi-faceted obstacle avoidance
12. It can be installed with dual GPS to realize ultra-high-precision satellite positioning, and it can also support RTK differential positioning
13. Support more than a dozen flight modes such as one-key return home, automatic cruise, automatic waypoint flight, fixed-point hover, fixed height, automatic landing, follow, self-stabilization, automatic circle, etc.
14. Can flash the original PIX firmware (PX4) and firmware for Ardupilot (APM), support vertical take-off and landing, two-axis, etc.
Package 3:
- 1 x For Pixhawk 2.4.8 Light Controller
- 1 x Safety Switch
- 1 x I2C Extension Board
- 1 x Buzzer
Note:
- SD card is not included in the package.
FAQ:
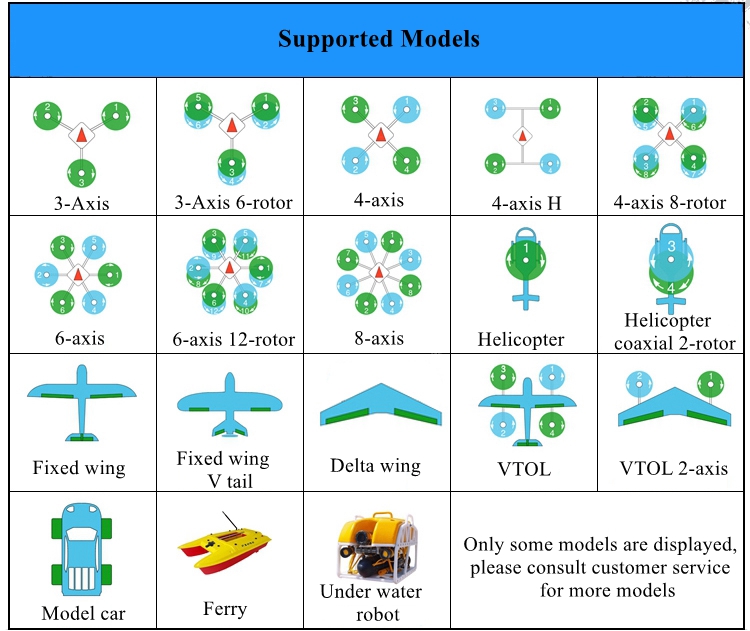
Q: What model does the flight control for Pixhawk support? What remote control is compatible?
A: Support almost all aircraft models, car models, boat models, underwater robots, etc. on the market. Supports for RadioLink, WFLY, Futaba, FLYSKY, MC, Walkera, Siyi, Skydroid, JR etc. more than 5 channels remote control
Q: How to power the flight controller?
A: You can purchase the version with an ammeter. Use the ammeter for power supply, or 5V voltage stabilizer module BEC power supply, or power supply with BEC ESC.
Q: Do GPS and flight controllers have their own compasses?
A: Both GPS and flight control have their own compasses, and they are used as dual compasses when in use.
Q: Can the flight control be re-developed?
A: For Pixhawk is an open source flight controller, it can be re-developed. After purchase, source code, environment establishment and other open source materials will be provided.
Q: Flight controller for Pixhawk VS APM flight controller
A: The flight control for Pixhawk is more stable and accurate, and can operate more efficiently. APM flight control is cost-effective.
Q: Does the flight controller provide technical support? Is there a tutorial?
A: We provide powerful technical support services, provide a full set of PIX debugging and installation video tutorials, easy to complete the debugging.
Q: How to achieve indoor fixed-point hovering? Does it support obstacle avoidance?
A: The indoor fixed point needs to be equipped with an optical flow sensor (be purchased separately), the fixed point and height can be realized indoors, and an ultrasonic module (be purchased separately) can support obstacle avoidance.