| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $124.55 | $122.01 | $118.19 | $113.11 | Contact US |
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M9 GPS Module for FPV Racing Drone Flight Control
$215.64
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M9 GPS Module for FPV Racing Drone Flight Control
$215.64
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M10 GPS Module for FPV Racing Drone Flight Control
$198.15
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M10 GPS Module for FPV Racing Drone Flight Control
$198.15
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module for FPV Racing Drone Flight Control
$151.51
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module for FPV Racing Drone Flight Control
$151.51
Flight Controller PIX 32Bit APM Flight Controller with M8N GPS for Pixhawk2.4.8 Multi-Rotor Drones
Features:
- Advanced 32-bit high-performance processor for ARM CortexM4, which can run NuttX RTOS real-time operating system
- 14 PWM/Servo outputs
- Bus interface (UART, I2C, SPI, and CAN)
- Integrated backup power supply and failure backup controller, can safely switch to backup control when the main controller fails
- Provide automatic and manual mode
- Provide redundant power input and fail-over function
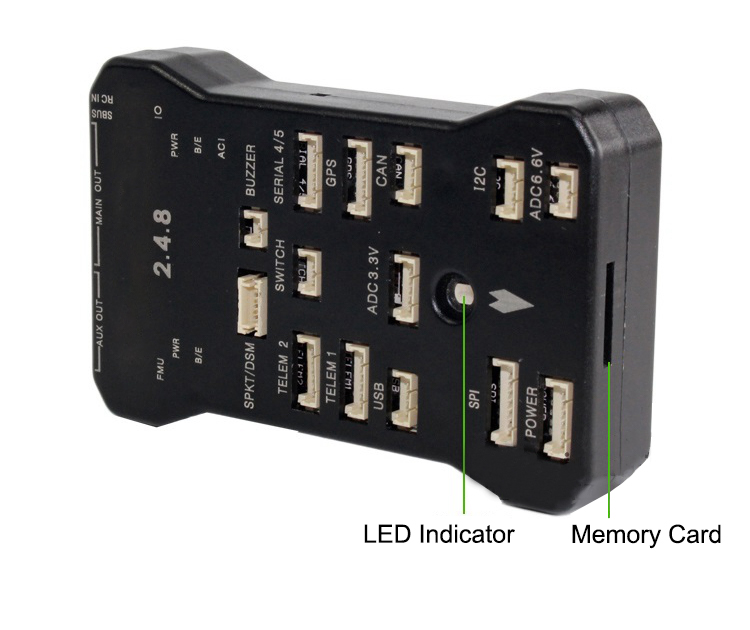
- Multi-color LED light
- Provide multi-tone buzzer interface
- Support MicroSD memory card to record flight data
- Flight control with built-in compass, imported barometer, and accelerometer, supporting dual GPS dual compass to work
- Flight control supports multi-rotor aircraft (applicable wheelbase includes 250, 330, 450, 500, 550, 650, and 680), fixed-wing aircraft, helicopter, ship model, car model, two-axis, VTOL aircraft and other models
- Adapt to most remote controllers on the market, including for MC6 series, RadioLink series, Flysky, Walkera, WFLY, and FUTABAD
- The original M8N GPS module has high precision and stable working performance. Can support multiple satellite
Specifications:
Processor:
- 32bit 2M flash STM32F427 for CortexM4, with hardware floating point processing unit with main frequency (168MHZ, 256K RAM)
- 32bit STM32F103 backup co-processor
Built-in Sensor:
- L3GD20 3-axis digital 16-bit gyroscope
- LSM303D 3-axis 14-bit accelerometer/magnetometer
- MPU6000 6-axis accelerometer/magnetometer
- MS5611 high-precision barometer
Working Voltage and Environmental Requirements:
- Operating temperature: -5°C to +55°C
- PM sensor working voltage: 2-6S
- PM sensor output voltage: 5.4V 3A
- PWM OUT input power supply voltage up to 9V (supports high voltage servos, while the original one for Pixhawk does not support power supply higher than 5.5V)
- 2-way power supply automatic redundancy (PM port and PWM OUT port). PM port gives priority to power supply, and automatically switches to PWM OUT port for power supply in case of failure
Dimensions and Weight:
- Flight controller size: 81 x 47 x 16mm/3.2 x 1.9 x 0.6"
- Net weight: 37G/0.08LB
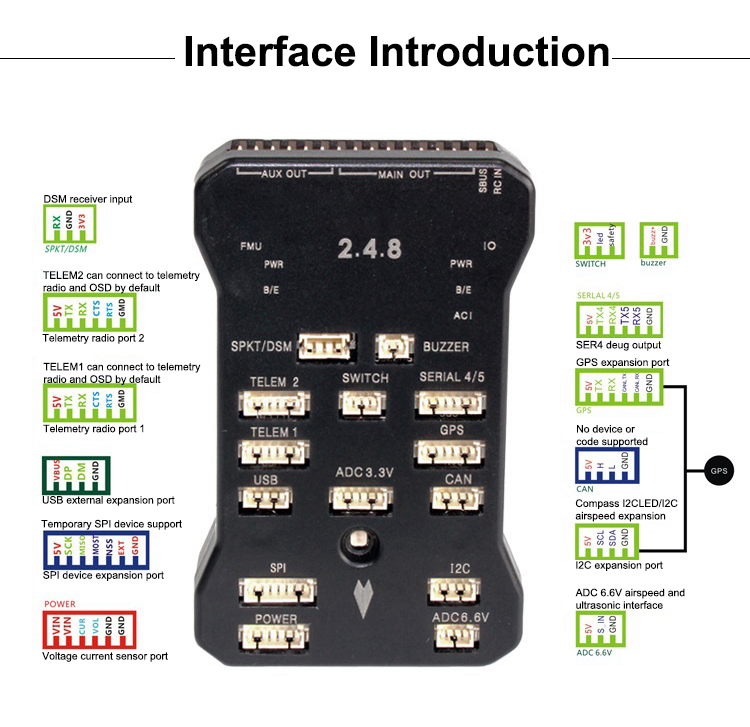
Data Interface:
- 14 PWM servo or ESC outputs
- 25 UART (serial ports), one of which supports high power, and two of which have hardware flow control
- Two CAN I/O interfaces (one has internal 3.3V receiving and transmitting, and the other is on the expansion interface)
- Support for Spektrum DSM/DSM2/DSM-X; Satellite receiver input: Allows the use of remote control receivers for Specktrum
- Support for Futaba S.BUS input and output
- PPM sum signal input
- RSSI (PWM or voltage) input
- I2C and SPI serial ports
- Two 3.3V and one 6.6V analog signal inputs
- Built-in microUSB interface and external microUSB interface expansion
- Contains its own on-board microcontroller and FMU stack
- Integrated power supply system with redundant design and extended protection
Peripheral Equipment:
- Support fixed wing drone, multi-rotor drone, helicopter, vehicle, and firmware
- Supported receiver types: S-Bus, DSM2, PPM. Attention: If an ordinary PWM receiver is used, a ppm encoder is required
- System requirements: for Windows XP SP3/7/8 (32 or 64 bit)
- Support external CUAV products: MINIM OSD, 3DR digital transmission, XTEND digital transmission, RTB BOX digital transmission, MAAT tracking antenna, optical flow sensor
Package Included:
- 1 x Flight controller
- 1 x Safety switch
- 1 x Buzzer
- 1 x 4GB MicroSD card
- 1 x PPM decoder board
- 1 x I2C expansion board
- 1 x Sponge adhesive tape
- 1 x Data cable
- 1 x M8N GPS module
- 1 x Current meter
- 1 x GPS bracket
- 1 x Shock absorber board
Note:
- Battery is not included. 2S~6S lithium polymer battery is recommended.
- Please leave a message about your desired current meter plug. If there is no remarks, the one with an XT60 plug will be delivered by default. Thank you!