| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $532.38 | $521.51 | $505.21 | $483.48 | Contact US |
 ORBBEC Gemini 2 L 0.25-7m 3D Binocular Structured Light Depth Camera Global Shutter RGB for Indoor/Semi-outdoor
$380.16
ORBBEC Gemini 2 L 0.25-7m 3D Binocular Structured Light Depth Camera Global Shutter RGB for Indoor/Semi-outdoor
$380.16
 ORBBEC Gemini 2 0.2-5m 3D Binocular Structured Light Depth Camera Rolling Shutter RGB for Indoor/Semi-outdoor
$306.32
ORBBEC Gemini 2 0.2-5m 3D Binocular Structured Light Depth Camera Rolling Shutter RGB for Indoor/Semi-outdoor
$306.32
 ORBBEC Gemini 2 XL 0.4-10m Binocular Structured Light Global Shutter RGB Long Distance 3D Camera without Ethernet Port
$527.37
ORBBEC Gemini 2 XL 0.4-10m Binocular Structured Light Global Shutter RGB Long Distance 3D Camera without Ethernet Port
$527.37
For Intel RealSense Tracking Camera T265 Redefines Tracking Compact Size Applied To Robotics Drones
Description:
Tracking Redefined:
Introducing a new class of standalone simultaneous localization and mapping device, Tracking Camera T265 for Intel RealSense can be used in robotics, drones and more.
For Intel RealSense Tracking Camera T265:
With its small form factor and low power consumption, the Tracking Camera T265 has been designed to give you the tracking performance you want straight off-the-shelf. Cross-platform, developer friendly simultaneous localization and mapping for all your robotics, drone and augmented reality rapid prototyping needs.
Low Power Consumption:
It uses a highly optimized proprietary V-SLAM algorithm that runs directly on the device, and the operating power is only 1.5W, which is incredible.
Precise Tracking:
After extensive performance testing and verification, the closed-loop offset is less than 1% 1 under the expected usage conditions.
Small And Light:
The device measures 108 x 24.5 x 12.5mm and weighs only 55grams, so it will not increase the weight of the prototype.
What is SLAM?
SLAM, or Simultaneous Localization and Mapping, is a computational problem - how does a device construct or update a map of an unknown environment while simultaneously keeping track of it’s own location within that environment? Before the days of GPS, sailors would navigate by the stars, using their movements and positions to successfully find their way across oceans. V-SLAM uses a combination of cameras and Inertial Measurement Units (IMU) to navigate in a similar way, using visual features in the environment to track it’s way around even unknown spaces with accuracy.
Inside The Camera
Tracking Camera T265 includes two fisheye lens sensors, an IMU and an for Intel Movidius Myriad 2 VPU. All of the V-SLAM algorithms run directly on the VPU, allowing for very low latency and extremely efficient power consumption. The T265 has been extensively tested and validated for performance, providing under 1% closed loop drift under intended use conditions. It also offers sub 6ms latency between movement and reflection of movement in the pose. This is fast enough for even highly-sensitive applications such as Augmented and Virtual Reality.
Simple and Versatile Prototyping:
For developers working on a robotics, drone or augmented reality systems, SLAM can be challenging to implement - requiring significant time and resources in order to add valuable environmental understanding. With the T265, developers can now have precise and robust tracking that has been extensively tested in a variety of conditions and environments. This self‑contained tracking system is designed for simple integration. There’s no need to redesign your board, simply plug in the provided USB cable and start streaming pose data straight away. The T265 also features an easy mounting solution, with standardized mounting sockets on the rear of the camera.
Part of The Family:
While there are many use cases for a stand-alone T265, it is definitely a part of the family for Intel RealSense Technology, and has been designed to work flawlessly alongside our other devices. The T265 features an infrared cut filter over the lenses, allowing it to ignore the projected patterns from our D400 series depth cameras. This means that developers can utilize both devices together with ease for advanced applications such as occupancy mapping or collision avoidance and navigation in locations where GPS data isn't available.
Specifications:
Features & Advantages:
- Proprietary V-SLAM, for Intel Real tech: High precision visual inertial odometer synchronous positioning and mapping algorithm
- For Intel Movidius Myriad 2.0 VPU: Optimized to run a V-SLAM vision processing unit at low power consumption
- Two fisheye lenses were combined with 163±5° FOV: The camera includes two OV9282 imagers with fisheye lenses, combined with a near-hemispheric 163±5° field of view angle for stable tracking even in fast motion
- BMI055 IMU: The Inertial Measurement Unit takes accurate measurements of the rotation and acceleration of the device and feeds them into a V-SLAM algorithm
- USB 3.1 Gen1 Micro B: Both USB 2.0andUSB 3.1 are supported for pure attitude data or a combination of attitude and image
- Size: 108 x 24.5 x 12.5mm: Small shape, easy to install on any device
- Depth output resolution and frame rate: Up to 1024 x 768 depth resolution. 30 frames per second
- 2 M3 0.5mm spaced mounting sockets: Install the camera firmly on to your device using these standard installation points on the back of the camera
Package Included:
- 1 x Set of Tracking Camera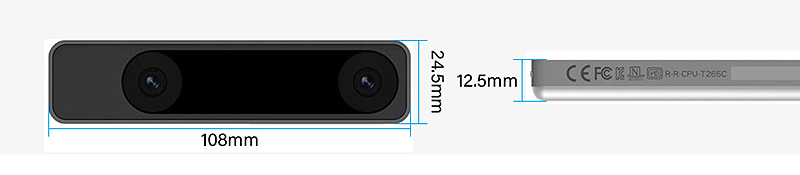
FAQ:
Q1: Is this a depth camera?
A1: For Intel RealSense T265 is not a depth camera. It features two fisheye lenses for feature detection, but does not compute dense depth. It is possible to use the image feed from the cameras to compute dense depth, though the results will be poor compared to other depth cameras for Intel RealSense as lenses are optimized for wide tracking field of view rather than depth precision, and there is no texture projected onto the environment to aid with depth fill.
Q2: Can I run SLAM on Intel RealSense Depth cameras? Why would I need T265?
A2: All SLAM solutions, and there are many good ones, are limited by the information they receive. It is possible to run host-based SLAM using our D400 series depth cameras - ideally the D435i, however these cameras are optimized for depth accuracy at the expense of field of view - D400 cannot see as much of the world as T265. As such, a SLAM solution based on the information from a single D400 camera will get lost in certain situations when T265 will not. Furthermore, the T265 is optimized for power and latency using its embedded VPU. For these reasons, T265 will succeed in many use cases where D400 based SLAM will fail.
Additionally, when using the T265, no additional resources are required on the platform in terms of compute to perform the SLAM algorithms, which means that tracking with T265 is platform independent, has a low integration cost, and can run on very low compute devices. For some use cases, SLAM on the D435i will be ideal, but for the highest quality tracking, choose the T265. For both quality depth and tracking, use the D415 and the T265 in parallel.
Q3: What platforms does the T265 support?
A3: At launch T265 includes support for Windows and Ubuntu. The Host API library is open sourced so customers can port it to any platform they want. It has been run on that for Android successfully. The FW that runs inside T265 is independent of host platform, so the performance of T265 is also host independent.
Q4: What are the hardware requirements?
A4: Since for Intel RealSense T265 computes all tracking data on device, the only hardware requirements are a USB 2 or USB 3 connection that provides 1.5W of power, along with enough memory and compute to boot the T265 and receive the pose data and use it in your application.
Q5: Can custom algorithms be added for Intel Movidius Myriad 2?
A5: The optimization of the algorithm on the VPU prevents it from being shared with other code or uses. Furthermore the thermal envelope of T265 is only large enough for the current workload.
Q6: What is wheel odometry and how does it help T265 navigate?
A6: Wheel odometry is the use of sensors to measure how much a wheel turns, it can be used to estimate changes in a wheeled robots position. T265 has wheel odometry support built in, allowing it to use the data from these sensors to refine the position data of the robot. Providing robotic wheel odometer or velocimeter data over USB to TM2 will make the tracking much more robust on wheeled robots, which otherwise can experience many tracking failures. We consider odometer input to be a requirement for robust tracking on wheeled robots.
Q7: Can T265 re-localize after being kidnapped?
A7: For Intel RealSense T265 can re-localize after kidnapping, providing there are some features in view which are in its internal map. In the case of a completely new environment, it will continue to provide relative pose data until absolute position can be re-established.
Q8: Can T265 work indoors and outdoors?
A8: Yes, T265 can work both indoors and outdoors. Just like a person, it can be blinded by light that shines straight into its eyes, and it can’t see in absolute darkness.
Q9: Can T265 work in low light conditions?
A9: While well-lit environments are preferable, T265 performs well at light levels as low as 15 lux, and depending on the exact structure of the light can sometimes continue to work at even lower light levels.
Q10: What is the ideal operating environment for T265?2
A10: An ideal operating environment for the T265 has a reasonable number of fixed, distinct visual features in view. It will perform poorly if the entire field of view contains moving, near field objects such as people. In cases where crowds are expected indoors, it is advised to point the camera upwards, where it can use features on the ceilings to navigate.
Q11: Do multiple T265 devices interfere with each other?
A11: No, you can use as many T265 devices in a space as you like.
















