| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $197.35 | $193.32 | $187.28 | $179.23 | Contact US |
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M9 GPS Module for FPV Racing Drone Flight Control
$215.64
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M9 GPS Module for FPV Racing Drone Flight Control
$215.64
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M10 GPS Module for FPV Racing Drone Flight Control
$198.15
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M10 GPS Module for FPV Racing Drone Flight Control
$198.15
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module for FPV Racing Drone Flight Control
$151.51
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module for FPV Racing Drone Flight Control
$151.51
Holybro Pixhawk 6C Mini Flight Control Module + PM02 Power Module + M10 GPS Module for PX4 RC UAV Opensource Controller
Difference between Pixhawk 6C and Pixhawk 6C Mini:
Ports:
These ports are unavailable in Pixhawk 6C Mini (compared to standard Pixhawk 6C):
- Power 2 port
- Telem3 port
- SBUS port
- IO Debugging port
- 4Pin USB port
- FMU PWM CH7 and CH8
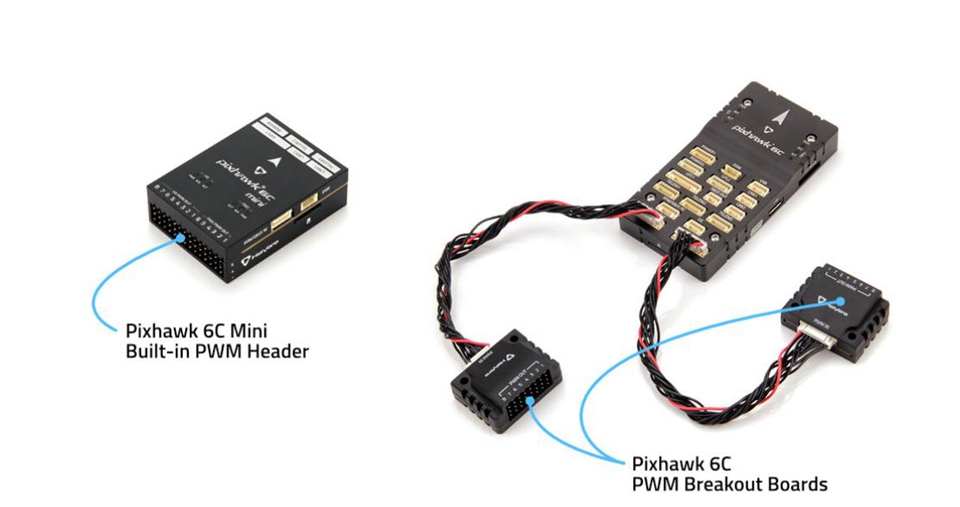
PWM Connector:
- Built-in PWM connector for Pixhawk 6C Mini, while independent PWM distribution board for standard Pixhawk 6C.
Description:
- The Pixhawk 6C Mini is the latest update to the successful family of Pixhawk flight controllers, based on the Pixhawk FMUv6C Open Standard and Connector Standard. It shares the same STMH743 microprocessor and sensors as the Pixhawk 6C. Compared to the standard Pixhawk 6C, this Mini version has a built-in PWM header, and some ports have been removed in order to fit this Mini form factor.
- Inside the Pixhawk 6C Mini, you can find an STMicroelectronics-based STM32H743, paired with sensor technology for Bosch & InvenSense, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications.
- The Pixhawk 6C Mini's H7 microcontroller contains the Arm Cortex-M7 core running up to 480 MHz and has 2MB flash memory and 1MB RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models.
- The FMUv6C open standard includes high-performance, low-noise IMUs on board, designed to be cost-effective while having IMU redundancy. A vibration isolation system to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances.
- The Pixhawk 6C Mini is perfect for developers at corporate research labs, startups, academics (research, professors, students), and commercial applications.
Key Design Points:
- High performance STM32H743 processor with more computing power & RAM.
- New cost-effective design in a small form factor.
- IMU redundancy with sensor technology for Bosch & InvenSense.
- Integrated vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings.
- IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs.
Specification:
Processor and Sensor:
- FMU processor: STM32H743, 32bit ARM for Cortex-M7, 480MHz, 2MB memory, 1MB SRAM
- IO processor: STM32F103, 32bit ARM for Cortex-M3, 72MHz, 64KB SRAM
- Onboard sensor:
Accelerator/gyroscope: ICM-42688-P
Accelerator/gyroscope: BMI055
Mag: IST8310
Barometer: MS5611
Electrical Data:
- Voltage ratings:
Max input voltage: 6V
USB power input: 4.75 ~ 5.25V
Servo rail input: 0 ~ 36V
- Current ratings:
TELEM1 max output current limiter: 1A
All other port combined output current limiter: 1A
Mechanical Data:
- Working temperature: -40℃ to 85℃
- Dimensions: 53.3 x 39 x 16.2mm
- Weight: 39.2g
Interfaces:
- 14 PWM servo outputs (8 from IO, 6 from FMU)
- 2 universal serial ports:
Telem1 - full flow control, independent 1.5A current limit
Telem2 - full flow control
- 2 GPS ports:
GPS1 - full GPS port (GPS + safety switch)
GPS2 - basic GPS port
- 1 I2C ports: support for the dedicated I2C standard EEPROM on sensor module
- 2 x CAN bus
- FMU Debug (Pixhawk Debug Mini)
- Dedicated R/C input, used for Spektrum/DSM and S.BUS, CPPM, analog/PWM RSSI
- 1 x power supply input port (analog)
Package Included:
- 1 x Flight Control
- 1 x PM02 Power Module
- 1 x M10 GPS
- 1 x Accessory Pack