| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $540.41 | $529.38 | $512.84 | $490.78 | Contact US |
 Cyberpunk Style Time Machine Watch Mecha Boys Gift (Assembled w/ Watch) for Birthday & Christmas
$135.86
Cyberpunk Style Time Machine Watch Mecha Boys Gift (Assembled w/ Watch) for Birthday & Christmas
$135.86
 Cyberpunk Style Time Machine Watch Mecha Gift (DIY Kit + Watch + Gift Bag) for Birthday & Christmas
$83.52
Cyberpunk Style Time Machine Watch Mecha Gift (DIY Kit + Watch + Gift Bag) for Birthday & Christmas
$83.52
 SO-100/LeRobot Assembled 12DOF Robotic Arm Two Mechanical Arms for Embodied Intelligent Robot
$425.46
SO-100/LeRobot Assembled 12DOF Robotic Arm Two Mechanical Arms for Embodied Intelligent Robot
$425.46
Mecanum Wheel Robot Car DIY Smart Car Frame Support ROS MAVROS RTK Automatic Cruise Binocular VIO
Specification:
Size: 405*298*160mm (length*width*height)
Material: steel plate, surface paint treatment
Moving speed: the fastest speed is 1m/s
Body weight: 5.5kg
Load weight: maximum load ≤5kg
Shock absorption method: 4WD independent suspension, parallel shock absorption structure
Drive mode: 4 groups of 12V motors with encoder (AB phase)
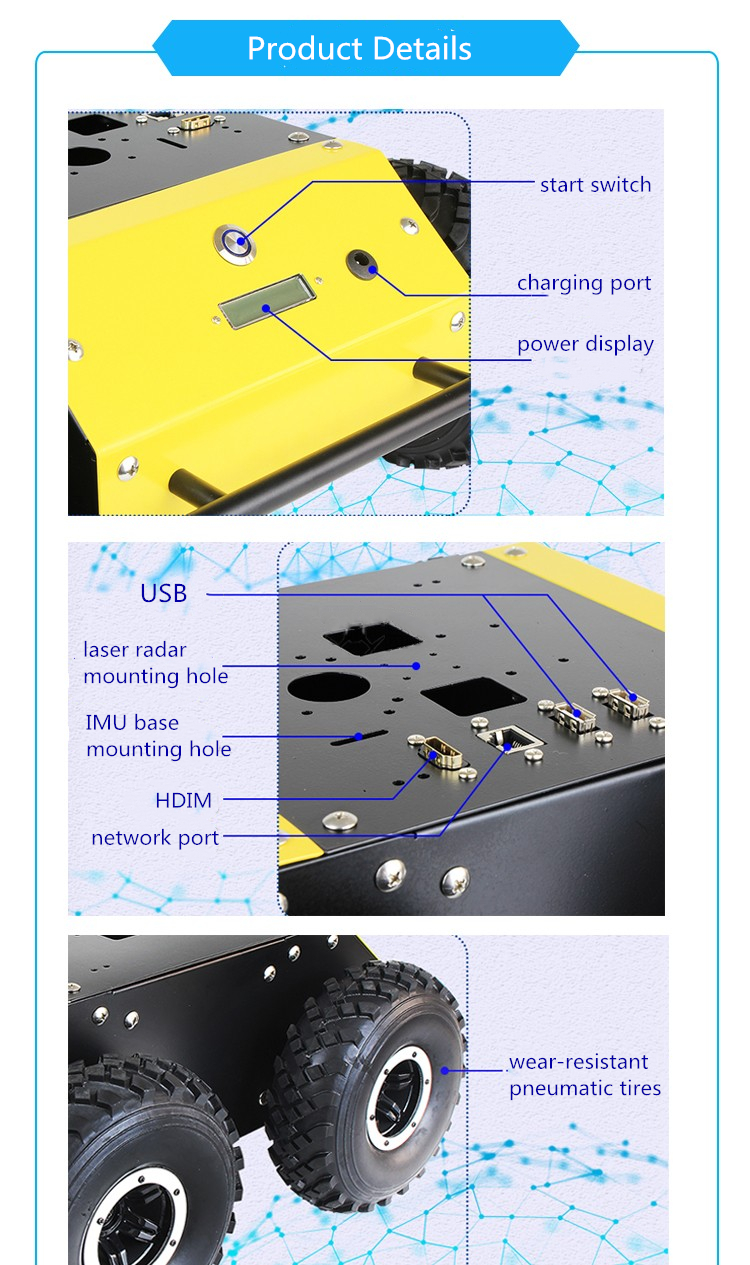
Pre-installed devices: pre-installed start switch, power indicator, charging port on the oblique side of the car body, pre-installed 2-USB interface, network port interface, HDMI interface on the top plate
The top plate is reserved for SLAM A1A2A3 mounting holes, for IMU base mounting holes, 2.4G antenna mounting holes, for Raspberry Pi 3B+ mounting bracket, STM32 main control board mounting bracket, battery mounting bracket.
Functions:
-GPS auto cruise
-ROS/MAVROS support
-Binocular positioning
-Ground station telemetry
-WFH algorithm
-Lidar obstacle avoidance
-Opencv image recognition
-Path planning algorithm development
-Ground station telemetry operation
-Visual frame selection tracking
-On-board computer control
Features:
1. Automatic cruise/path planning
By using the QGC/MP ground station to edit the waypoint path, the unmanned vehicle can complete the MISSION according to the preset route. The design and development of path planning is based on simulation. The vehicle supports ROS and GAZEBO interfaces to provide a perfect path planning simulation environment. The simulation code and the actual code are seamlessly switched.
2. Multi-sensor fusion
The GPS positioning, lidar positioning, and visual positioning modules all have corresponding hardware and interfaces to facilitate the estimation of the state of unmanned systems (multi-sensor fusion direction).
3. Visual positioning binocular VIO
Support V-SLAM to directly output location information, provide positioning, SLAM, raster map, OCTOMAP for unmanned vehicles. At the same time, use binocular camera to achieve visual tracking. Such as deep learning tracking, frame selection tracking.
4. Lidar positioning
The CARTORGRAPHER algorithm provides position information for unmanned vehicles and at the same time, lidar constructs a two-dimensional map to achieve path planning. Support 4G/5G, WIFI, RF data transmission to achieve the purpose of LAN and remote control.
5. Centimeter level positioning
RTK (reserved RTK interface) can be used outdoors, supporting centimeter-level positioning.
6. Lidar obstacle avoidance
By using the VFH algorithm, the PIONEER car can achieve the effect of real-time obstacle avoidance in autonomous mode. In the process of automatic cruising, the car continuously avoids obstacles without stopping, and subsequently supports the octree obstacle avoidance.
Package List:
1 x Mecanum Wheel Robot Car











")


