| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $66.52 | $65.16 | $63.13 | $60.41 | Contact US |
 Radiolink SE100 M10N GPS Module High Precision Positioning Module for Pixhawk FPV Flight Controller
$38.80
Radiolink SE100 M10N GPS Module High Precision Positioning Module for Pixhawk FPV Flight Controller
$38.80
 SKYDROID H12 PRO 12-Channel 2.4-2.483GHz FPV Remote Controller 6-10KM Wireless Control for FPV Racing Drones
$319.84
SKYDROID H12 PRO 12-Channel 2.4-2.483GHz FPV Remote Controller 6-10KM Wireless Control for FPV Racing Drones
$319.84
 GSM020 (GPS+GLONASS) GNSS Performance Analyzer Measures G-force Speed & Time for RC Cars and Planes
$80.16
GSM020 (GPS+GLONASS) GNSS Performance Analyzer Measures G-force Speed & Time for RC Cars and Planes
$80.16
Mini APM Pro Flight Control Opensource Hardware with Neo-7N GPS & Power Module & Mini OSD for Multicopter Aircraft
Description:
- Mini APM PRO, the new generation of APM
- Size: 60*38*14mm
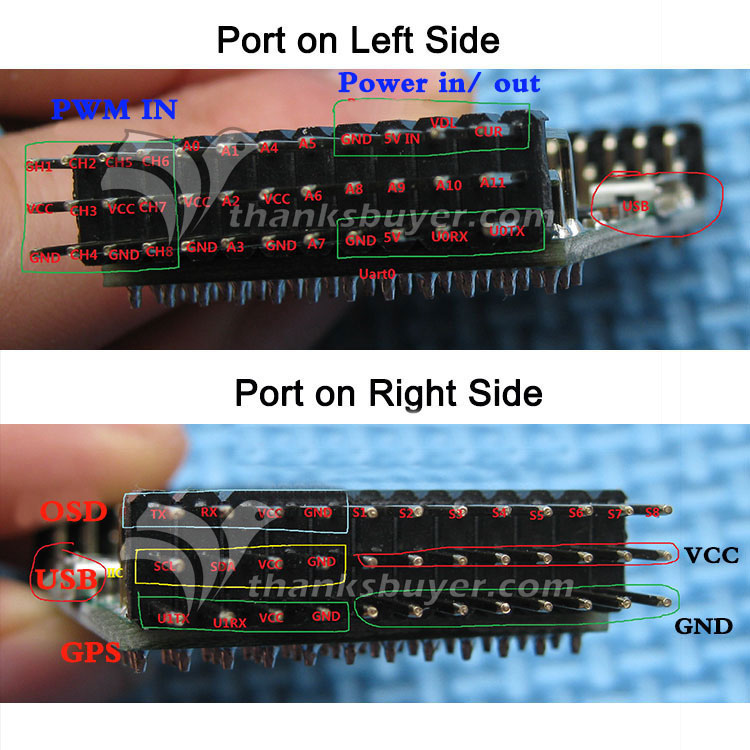
- All interfaces are moved to the two sides, the middle part is no longer used for wiring
- Standard 2.54 dupont plug
Improvements made on the basis of original 2.6
- 3.3V LDO is easy to be burnt down, so it is changed to the imported large current LDO, support continously output 500MA high performance power supply
- Two diodes are changed to Pixhawk Pix PMEG2005 super low differential voltage dynatron
- 22UF/16V capacity was added into 5V module to ensure stable power of main controller (2560 part).
- All interfaces are designed at the two sides
- Two individual RGB colorful light
- Compression version PWM input, it only needs 4 servo cables to realilze 8 channels PWM
Power Supply Module Description:
- PM function: used for detecting battery voltage and current, flight control board receives these two signals, calculating battery remaining power, and remaining flying time
- This module has BEC function, can output 5.3V DC, max 3A continuous current, supply stable power for flight control board
- The signal cable connector adopts Japan original connector, making the connection reliable
- The Mini APM Pro Power Module is a simple way of providing your Mini APM Pro with clean power from a LiPo battery as well as current consumption and battery voltage measurements, all through a 6-pos cable. The on-board switching regulator outputs 5.3V and a maximum of 2.25A from up to a 4S LiPo battery. The Power Module comes completely assembled with Deans connectors, and wrapped in shrink tubing for protection.
U-blox Neo-7N GPS Specification:
- With shell, the cables are fixed and cannot be moved, can connect with APM Pro
- Internal core of new version surpasses 6M, compare favourably with 6H
- Cold start positioning time is less than 40 seconds
- Warm start positioning time is less than 5 seconds
- Positioning accuracy is 2m
- NEO-7N is of high performance, quick research, high positioning precision, very rstable
Mini OSD Specification:
- APM Pro/APM has an companion OSD board called Mini OSD. It reads all the MAVLink data in the APM telemetry stream and overlays it on the video stream if you're using an on-board camera and wireless video transmitter. This is useful if you're flying in First Person View (FPV) mode or don't want to use a laptop at the field to see your telemetry data in the Mission Planner.
Instructions on connecting and using the Mini OSD board via the APM Pro/APM telemetry port are here. Connection photos with APM Pro and APM 2.6 2.8 are below.
Note: If it is used for QAV 250 mini quadcopter, you should add damper base for the flight control
User Manual Down: Click Here
Package Include:
- Mini APM PRO flight control x 1 (including shell)
- PWM dupont cable x 4
- 3M adhesive paste x 1
- Ublox Neo-7N GPS for APM Pro x 1
- Power Supply Module for Mini APM Pro x 1
- On-Screen Ardupilot Mega Mini OSD x 1















