| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $1,024.40 | $1,003.50 | $972.14 | $930.33 | Contact US |
 Coolmay MX3G-70C-48MT 7" HMI PLC All in One HMI with Built-in PLC (24DI 24DO Transistor Output)
$155.14
Coolmay MX3G-70C-48MT 7" HMI PLC All in One HMI with Built-in PLC (24DI 24DO Transistor Output)
$155.14
 Coolmay MX3G-43C-22MT 4.3" HMI PLC All in One HMI with Built-in PLC (12DI 10DO Transistor Output)
$95.71
Coolmay MX3G-43C-22MT 4.3" HMI PLC All in One HMI with Built-in PLC (12DI 10DO Transistor Output)
$95.71
 SEEKU WS7020T 2-in-1 PLC HMI PLC Controller (with Transistor Output) & 7" HMI Display 12DI 8DO
$79.42
SEEKU WS7020T 2-in-1 PLC HMI PLC Controller (with Transistor Output) & 7" HMI Display 12DI 8DO
$79.42
MyCobot 6 Axis Robot Arm Desktop Robotic Arm Programmable Mechanical Arm Load 250G With Two Screens
Description:
MyCobot is the world's smallest and lightest six-axis collaborative robot, jointly produced by Elephant Robotics and M5STACK. It is more than a productivity tool full of imaginations, can carry on the secondary development according to the demands of users to achieve personalized customization.
With a weight of 850g, a payload of 250g and an arm length of 350mm, myCobot is compact but powerful, can not only be matched with a variety of end effectors to adapt to different kinds of application scenarios also support the secondary development of multi-platform software to meet the needs of various scenarios such as scientific research and education, smart home, light industry and commercial applications.
Features:
- Working radius 280mm, repeatability ±0.5mm, payload 250g
- High configuration & Equipped with 2 Screens: myCobot contains 6 high-performance servo motors with fast response, small inertia and smooth rotation. The body carries 2 display screens supporting for FASTLED library to show the expanded application scene more easily and clearly.
- Unique Industrial Design & Extremely Compact: myCobot is an integrated modular design and only weighs 850g which is very easy to carry. Its overall body structure is compact with less spare parts and can be quickly disassembled and replaced to realize plug and play.
- Track Recording & Learn by hand: Get rid of the traditional point saving mode, myCobot supports drag trial teaching to record the saved track and can save up to 60mins different Tracks making it easy and fun for new players to learn.
- Connector Lego for & Thousands of M5STACK Ecological Application: The base and end of myCobot are equipped with Connector for Lego, which is suitable for the development of various miniature embedded equipment. Its base is controlled by M5STACK Basic, and thousands of application cases can be use directly.
- Bloky Programming & Supporting Industrial ROS: Using visual programming software for UIFlow, programming myCobot is simple and easy for everyone. You can also use RoboFlow, software of industrial robots from Elephant Robotics, supporting multiple functional modules for Arduino + ROS open source system.
- Collaborate Safely and Create as much as You Want: It can be easily applied to light industry, commerce, scientific research and education and other occasions to create more value!
Product Parameters:
- Degree of Freedom: 6
- Payload: 250g
- Arm Span: 350mm
- Working radius: 280mm
- Repeatability: ±0.5mm
- Net Weight: 850g
- Power Supply Input: 8V, 5A
- Working Condition: -5℃ to 45℃
- Communication: USB/Type-C
Vice Control Board Parameters:
- Model: M5 Atom
- Chip: ESP32, 240MHz dual-core, 520KB SRAM
- Flash: 4MB
- Installation position: behind the sixth joint
- LED display: WS2812C 2020 X25
- Software: non-open source, firmware can be burned
Main Control Board Parameters:
- Model: M5 Basic
- Chip: ESP32, 240MHz dual-core, 520KB SRAM
- Flash: 16MB
- Wireless: Support 2.4g 3D antenna and Bluetooth
- Installation position: center of base
- Screen: 320x 240 full color TFT LCD, brightness 853nit
- Speaker: 1W-0928
- IO port: PIN (G1, G2, G3, G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36)
- Software: built-in trajectory entry program, built-in correction program, for Arduino, UIFlow, and RoboFlow
Package Included:
- 1 x Set of Robotic Arm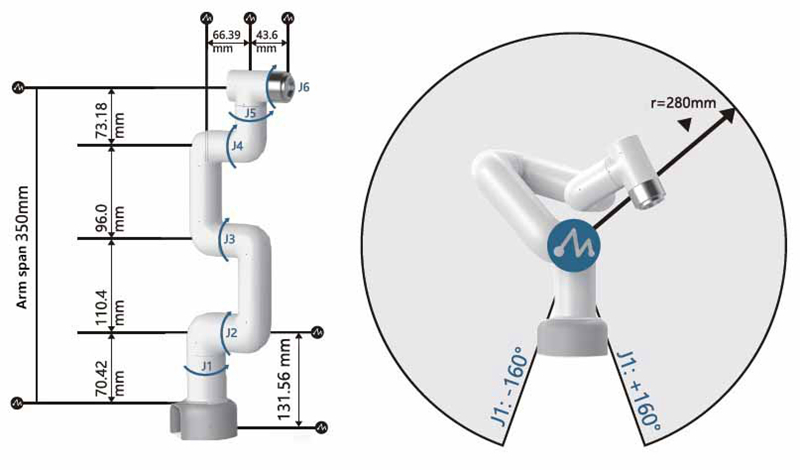
FAQ:
Q1: Why can't my compiler find any corresponding device?
A1: You need to build a development environment and install the corresponding project library before developing equipment.
Q2: Why can't my compiler compile sample program normally?
A2: The required project library is not installed or the project library is in conflict. It is recommended to check whether the project library is installed correctly. If the installation is correct but still cannot be compiled, please reinstall the development environment for ARDUINO.
Q3: Why does my device not work normally after I burned the firmware to the ATOM terminal?
A3: The firmware of the ATOM terminal needs to use our factory firmware, and other unofficial firmware cannot be changed during use. If the device accidentally burns other firmware, you can use the MYCOBOT firmware burner, select ATOM terminal-select serial port-select ATOMMAIN firmware for ATOM terminal perform burning.
Q4: Why is there a slight jitter in the vertical state when I use it, but not when it is running?
A4: Please check whether it is in a vertical state. In the vertical state, it is not affected by gravity. The mechanical gap causes a slight jitter. This situation will not occur when used after being out of this state. The recommended speed in this state is 400-500.
Q5: Will the ROS system be charged later?
A5: ROS is open source and will be updated to our Github. There is no charge for firmware upgrades.



















