| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $114.25 | $111.92 | $108.42 | $103.76 | Contact US |
 TR500S 24V 300W DC Brushless Motor Tank Chassis Robot All-Terrain Chassis Rubber Track Assembled Load 50KG No Controller
$1,989.77
TR500S 24V 300W DC Brushless Motor Tank Chassis Robot All-Terrain Chassis Rubber Track Assembled Load 50KG No Controller
$1,989.77
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$273.65
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$273.65
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
N10 25M/82FT TOF Lidar Sensor Entry-level Laser Range Scanner with Serial Port Adapter Board
Specifications:
- Model: N10
- Type: close range
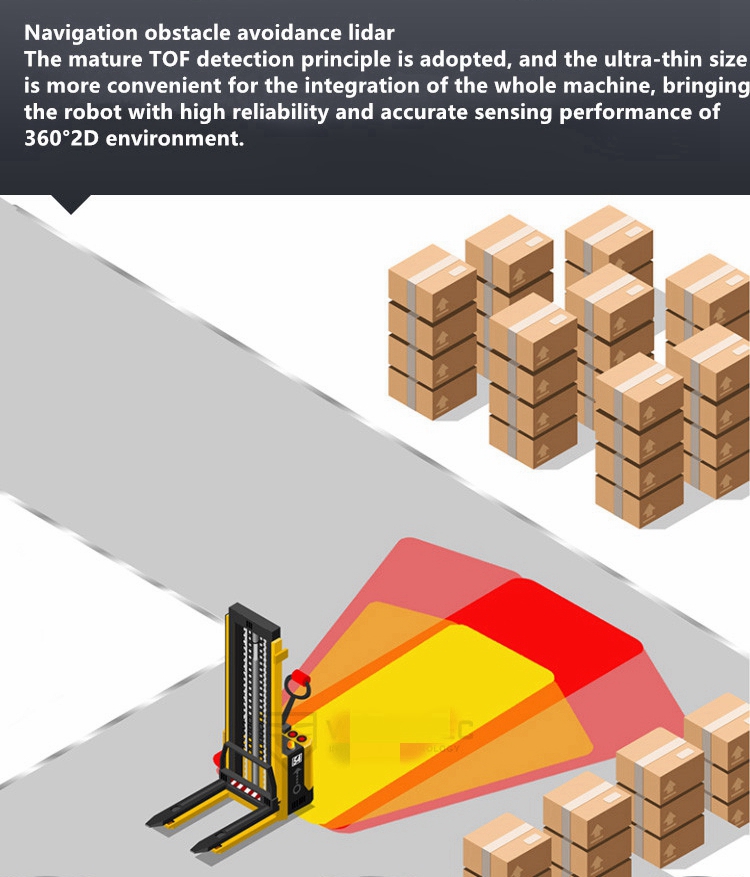
- Ranging principle: TOF (can be used indoors and outdoors)
- Scanning angle: 360°
- Angular resolution: 0.8°
- Measurement frequency: 4500 times/s
- Scanning frequency: 10HZ
- Output data resolution: 15mm/0.6"
- Dimensions: Diameter 52 x 36.1mm/2 x 1.4"
- Weight: about 80G/0.2LB
- Measuring distance accuracy: ±3cm/±1.2" (0~6m/0-19.7ft); ±4.5cm/±1.8" (≥6m/19.7ft) (70% reflectivity target)
- Light source: 905nm laser
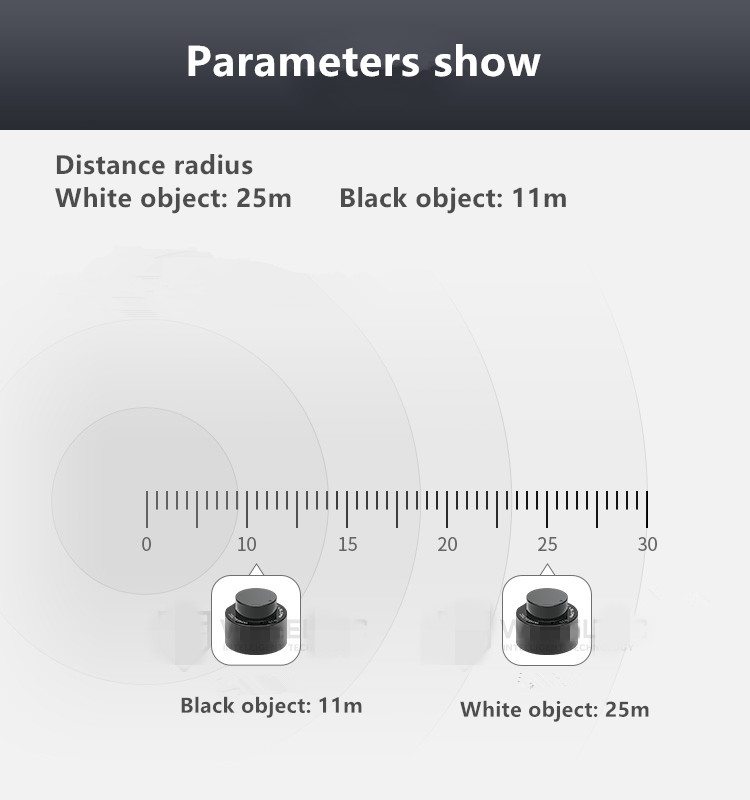
- Measuring Radius: White Object: 25m/82ft; Black Object: 11m/36.1ft
- Minimum measuring distance: 0.1m/0.3ft
- Data content: distance, angle, and light intensity
- Power supply: 5V DC
- Ambient temperature: Working: -10℃ to 40℃; Storage: -30℃ to 70℃
- Drive mode: built-in brushless motor
- For WINDOWS: Provide client software for WINDOWS
- ROS support: ROS1/ROS2
- STM32 support: Support STM32 acquisition; provide data acquisition routine radars and STM32 microcontroller obstacle avoidance code
- Protection class: IPX4
- Communication interface: standard serial port (baud rate: 230400bps)
- Application scenarios: 2D map reconstruction, real-time navigation and obstacle avoidance, commercial robots, service robots, autonomous driving, large-screen interaction
Other Functions:
- Support STM32 driver. Provide the source code of STM32 acquisition radar angle and distance
- Can output light intensity information (most lidars do not have this function)
- Support ROS application in the environment for Linux
- 2D mapping (map environment reconstruction) and navigation
- Lidar aided visual mapping navigation
- APP mapping navigation
- Radar following mode
Package Included:
- 1 x N10 Radar
- 1 x Serial Port Adapter Board
- 1 x Micro USB Data Cable for Android
Note:
- Bracket for N10 radar is optional. If it is needed, please contact us to cover its costs.
Other Information Offered:
We provide information for Raspberry Pi, Jetson nano, Xavier NX and industrial computer, which is convenient for you to transfer from scientific research to application in the later stage.
√ The data is completely open source and supports secondary development
√ Provide ROS source code package: ROS source code can quickly help you connect robot car to the ROS system, and provide technical support for STM32, ROS, Linux and SLAM
√ Provide ROS introductory manuals
√ Code-level ROS development manual
√ Getting starter manual for gazebo
√ Deep learning video tutorial based on the autonomous driving sand table scene (Chinese and English subtitles)
√ Video tutorial of moveit robotic arm (Chinese and English subtitles)
√ ROS SLAM principle and algorithm detailed video tutorial (Chinese and English subtitles)
√ ROS basic video tutorial (Chinese and English subtitles)
√ STM32 underlying source code and ROS communication video tutorial (Chinese and English subtitles)
√ ROS related basic tutorial for Ubuntu (Chinese and English subtitles)
√ Code-level video tutorial for ROS function development (some videos with Chinese and English subtitles)
√ ROS voice special video tutorial (Chinese and English subtitles)
√ Special video tutorials on motors, servo, PID, etc.