| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $61.42 | $60.16 | $58.28 | $55.78 | Contact US |
 SimpleFOC Shield V2.0.4 BLDC Motor Driver Board Compatible with Ar-duino UNO & for Gimbal Motors
$29.43
SimpleFOC Shield V2.0.4 BLDC Motor Driver Board Compatible with Ar-duino UNO & for Gimbal Motors
$29.43
 SimpleFOC Shield V1.3.3 Brushless DC Motor Driver Board for Low-power FOC Applications up to 5Amps
$24.18
SimpleFOC Shield V1.3.3 Brushless DC Motor Driver Board for Low-power FOC Applications up to 5Amps
$24.18
 FLYCOLOR Raptor 5th Generation G071 60A 3-6S 4-in-1 ESC 128K Drone ESC Suitable for FPV Drones
$76.28
FLYCOLOR Raptor 5th Generation G071 60A 3-6S 4-in-1 ESC 128K Drone ESC Suitable for FPV Drones
$76.28
PID Learning Kit Encoder Position Control DC Motor Speed Control PID Development Parts For STM32
Features:
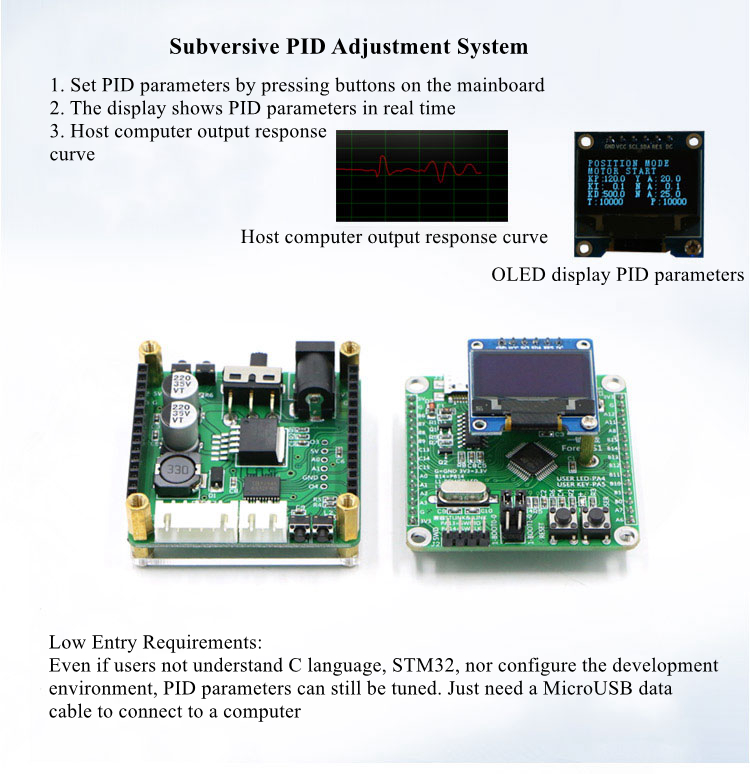
- PID learning kit: support for simulink, provide video tutorials, provide development notes, modular main control
- Metal Flange Coupling: You can better observe the running effect of the motor
- Provide for Simulink-based STM32 code automatic generation tutorial: For simulink generates code-related parts that involve a lot of basic knowledge, technical support is not provided, and adapted video tutorials are provided. Support the use of programming for simulink and matlab, and then generate C language code and download it to the controller to run, that is to say, even if you do not use C language, you can complete the physical control of the PID algorithm by building a control flowchart through the module provided by for simulink. This is a very practical and scientific technology, providing related video tutorials and development manuals. This technology can be extended to almost all STM32 development projects. Note: The code generation currently only supports the STM32 version. In addition to the code generated by for simulink, the codes for routine use of STM32 library functions and registers developed by for MDK are provided
- Provide the right to use original materials: provide the following original materials download links after purchase, and enjoy the privilege of free lifetime update of this product information. Purchase version for Arduino, provide information for Arduino version. Purchase version for STM32, provide information for STM32 version. Offer new motor PID video tutorial. Provide relevant development notes and relevant source code. The original data of the host computer: monitor various parameters in the form of waveforms and graphs. It is an ideal choice for in-depth analysis of PID, balance trolley, inverted pendulum, robot, etc. All data can be saved in the form of text or table and sent to software for Matlab for further analysis
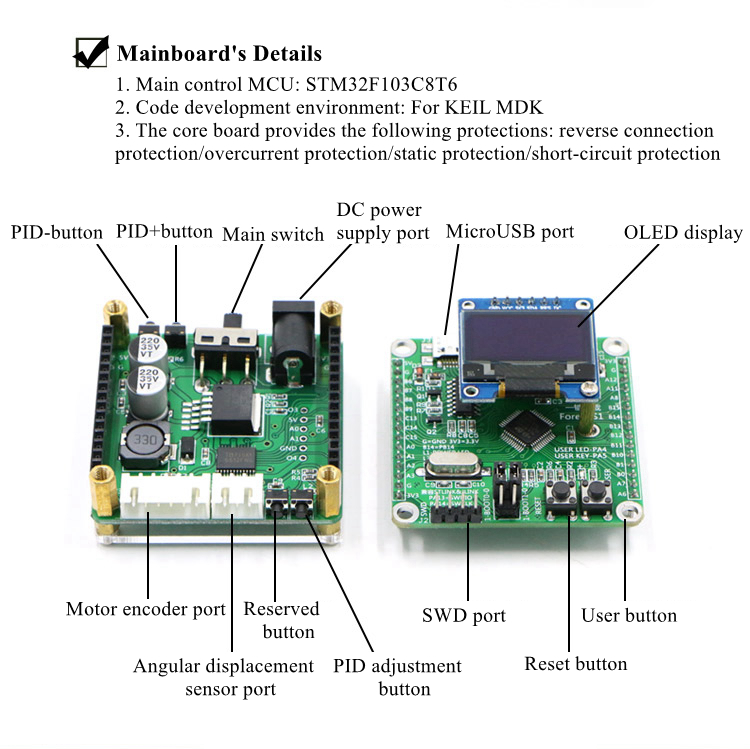
- The system board can replace the simple STM32 development board. Provide more than 100 pages of development manual and 11 individual routines. For non-electronics major users can quickly get started. Added multiple routines and manuals such as speed position closed-loop control
Product Information:
- Name: DC motor PID learning kit
- Function: Learning of position, speed control, PID parameter setting of DC motor, etc.
- Hardware: DC motor with encoder, all-metal motor bracket, flange, controller, MicroUSB data cable, etc.
- Software: DC motor PID development guide, source code, schematic diagram, etc. (all original)
- For People: Users who are interested in DC motor control and PID and need further learning
- N.W.: 427g
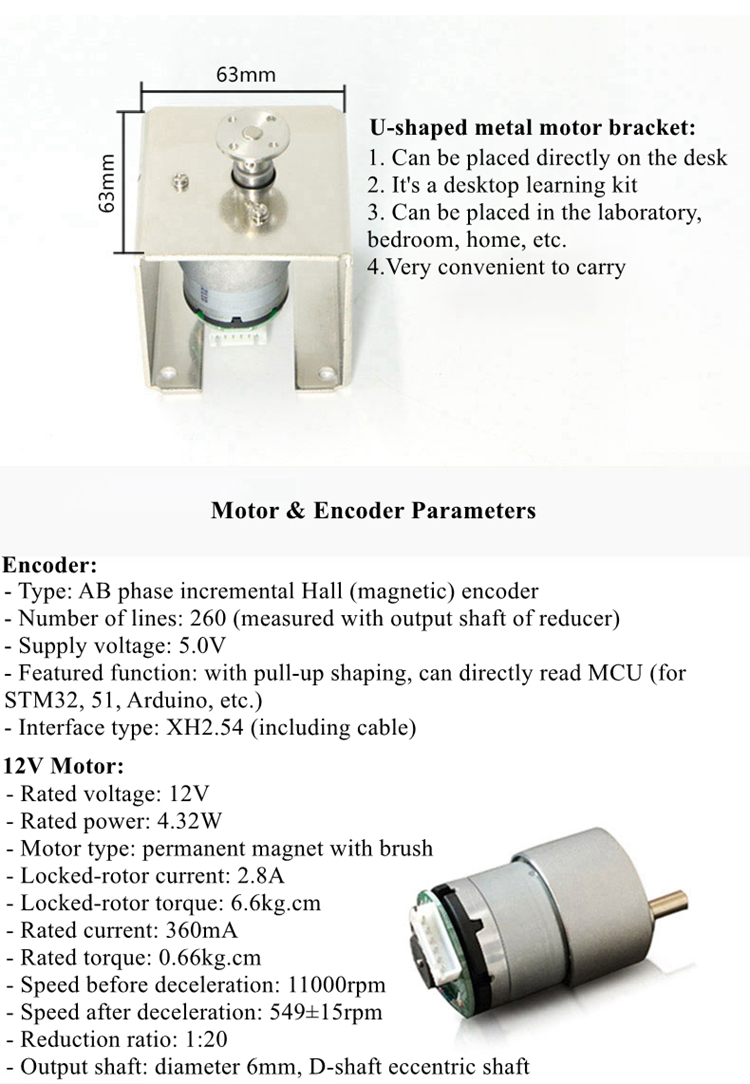
U-shaped Metal Motor Bracket:
1. Can be placed directly on the desk
2. It's a desktop learning kit
3. Can be placed in the laboratory,
bedroom, home, etc.
4.Very convenient to carry
Motor & Encoder Parameters:
12V Motor:
- Rated voltage: 12V
- Rated power: 4.32W
- Motor type: permanent magnet with brush
- Locked-rotor current: 2.8A
- Locked-rotor torque: 6.6kg.cm
- Rated current: 360mA
- Rated torque: 0.66kg.cm
- Speed before deceleration: 11000rpm
- Speed after deceleration: 549±15rpm
- Reduction ratio: 1:20
- Output shaft: diameter 6mm, D-shaft eccentric shaft
Encoder:
- Type: AB phase incremental Hall (magnetic) encoder
- Number of lines: 260 (measured with output shaft of reducer)
- Supply voltage: 5.0V
- Featured function: with pull-up shaping, can directly read MCU (for STM32, 51, Arduino, etc.)
- Interface type: XH2.54 (including cable)
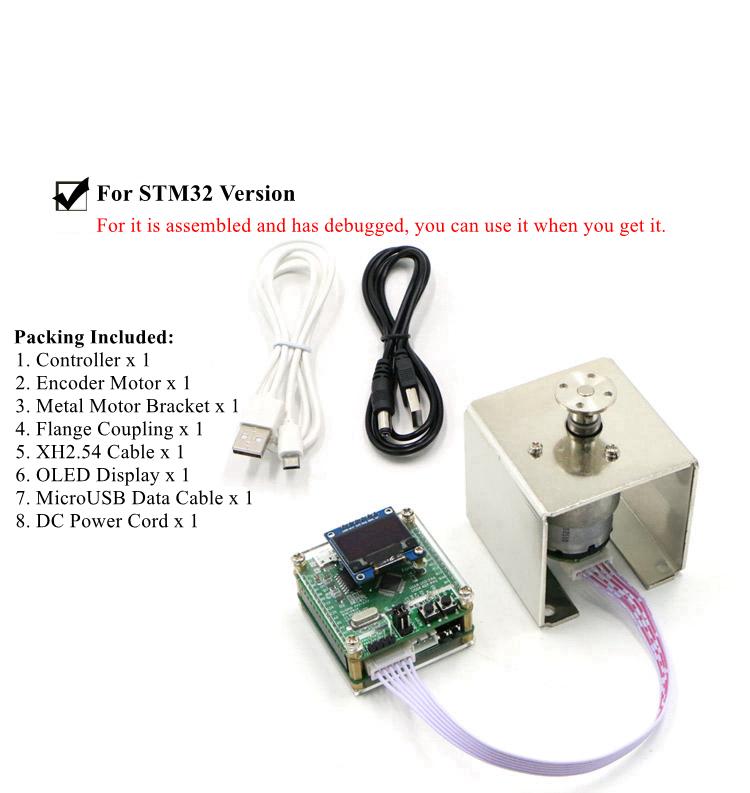
Packing Included (For STM32 Version):
For it is assembled and has debugged, you can use it when you get it.
1. Controller x 1
2. Encoder Motor x 1
3. Metal Motor Bracket x 1
4. Flange Coupling x 1
5. XH2.54 Cable x 1
6. OLED Display x 1
7. MicroUSB Data Cable x 1
8. DC Power Cord x 1