| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $101.43 | $99.36 | $96.26 | $92.12 | Contact US |
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M9 GPS Module for FPV Racing Drone Flight Control
$215.64
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M9 GPS Module for FPV Racing Drone Flight Control
$215.64
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M10 GPS Module for FPV Racing Drone Flight Control
$198.15
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M10 GPS Module for FPV Racing Drone Flight Control
$198.15
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module for FPV Racing Drone Flight Control
$151.51
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module for FPV Racing Drone Flight Control
$151.51
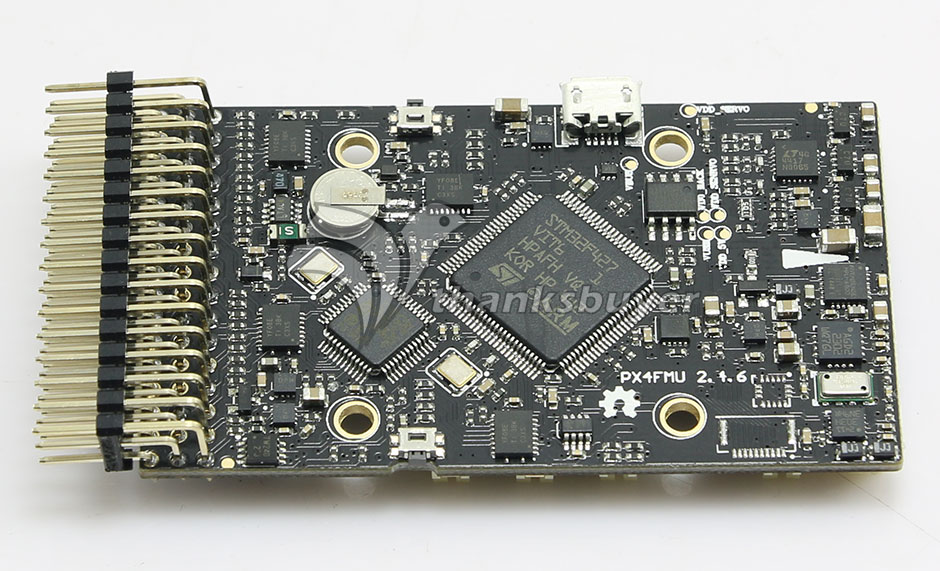
Pixhawk PX4 Autopilot PIX 2.4.6 Flight Controller 32 bit ARM /w NEO-7M GPS for RC Multicopter
Pixhawk 2.4.6 Description:
Compare to the old version 2.4.5, this newest version make several improvements.
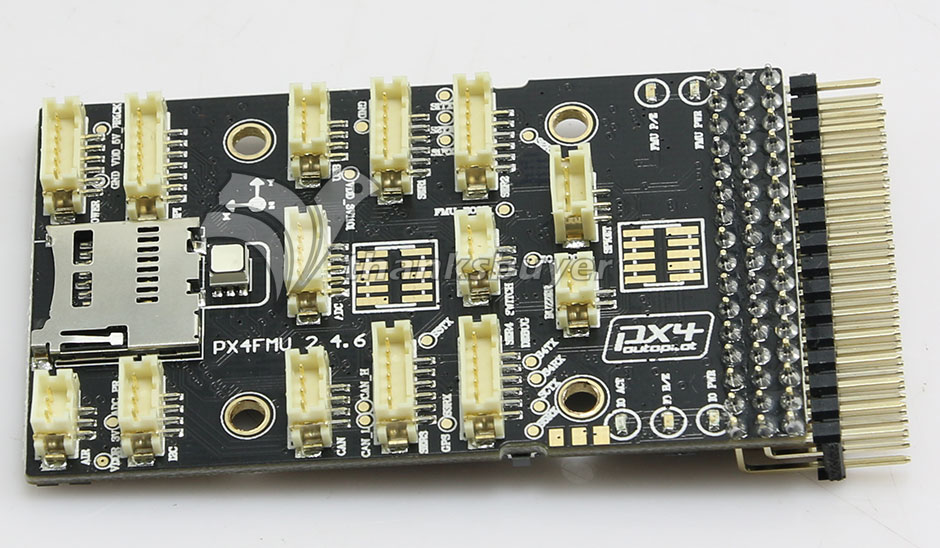
- SD card base adopts deadlock function. SD card will not be easily taken out unless press the SIM
- The front jacks all adopts imported the gilded needle, has better contact resistance, more stable and reliable
- NEC original tantalum capacitor is added in back compass and main power supply, making each sensor has stable power supplying and lesser possibility of aircraft crashing
- The same matte black gold plate as the original version, high quality
Features
- with external LED -Dual Size full angle LED
- Advanced 32 bit ARM Cortex® M4 Processor running NuttX RTOS
- 14 PWM/servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes
- Redundant power supply inputs and automatic failover
- External safety button for easy motor activation
- Multicolor LED indicator
- High-power, multi-tone piezo audio indicator
- microSD card for long-time high-rate logging
Microprocessor:
- 32-bit STM32F427 Cortex M4 core with FPU
- 168 MHz/256 KB RAM/2 MB Flash
- 32 bit STM32F103 failsafe co-processor
Sensors:
- ST Micro L3GD20H 3-axis 16-bit gyroscope
- ST Micro LSM303D 3-axis 14-bit accelerometer / magnetometer
- Invensense MPU 6000 3-axis accelerometer/gyroscope
- MEAS MS5611 barometer
Interfaces:
- 5x UART (serial ports), one high-power capable, 2x with HW flow control
- 2x CAN
- Spektrum DSM / DSM2 / DSM-X® Satellite compatible input
- Futaba S.BUS® compatible input and output
- PPM sum signal
- RSSI (PWM or voltage) input
- I2C®
- SPI
- 3.3 and 6.6V ADC inputs
- External microUSB port
Power System:
- Ideal diode controller with automatic failover
- Servo rail high-power (7 V) and high-current ready
- All peripheral outputs over-current protected, all inputs ESD protected
Weight and Dimensions:
- Weight: 38g (1.31oz)
- Width: 50mm (1.96")
- Thickness: 15.5mm (.613")
- Length: 81.5mm (3.21")
NEO-7M GPS Features:
- uBlox Neo-7M module
- 56-channel
- GPS L1 C/A, GLONASS L1 FDMA
- QZSS L1 C/A
- Galileo E1B/C
- SBAS: WAAS, EGNOS, MSAS
- 10Hz update rate
- 25x25x2 Ceramic patch antenna
- Rechargeable 3V Backup battery
- Low noise 3.3V regulator
- I2C EEPROM storage
- Power and fix LED's
- Pedestal Mount/Case
- Pixhawk/PX4 compatible
- LNA MAX2659ELT+
- Pre-configured 38,400 Baud and prams
NEO-7M GPS Specifications:
- Size: 60x11.5mm
- Mount: 140mm length
- Cable length: 200mm
- Weight: 26g
- Connection: Pixhawk interface
Pixhawk includes:
- Pixhawk px4 2.4.6 32 bit ARM Flight Controller X 1pcs
- Original shell X 1pcs
- Buzzer X 1pcs
- Safety button X 1pcs
- Neo-7M GPS X 1pcs

 Flight Controller 32 bit ARM with NEO-7M GPS for RC Multicopter")
 Flight Controller 32 bit ARM with NEO-7M GPS for RC Multicopter")
 Flight Controller 32 bit ARM with NEO-7M GPS for RC Multicopter")




 32 bit ARM Flight Controller & NEO-6M GPS/8G TF Card/Led External/PPM/PM Module/915Mhz DTM for RC Multicopter")


 32 bit ARM Flight Controller & 8G TF Card/M8N GPS/Led External/PPM/Folding Holder for RC Multicopter")
