| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $414.67 | $406.20 | $393.51 | $376.59 | Contact US |
 V550 ROS2 Robot Educational Robot (Mecanum Wheels) + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar
$764.86
V550 ROS2 Robot Educational Robot (Mecanum Wheels) + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar
$764.86
 V550 ROS2 Robot Educational Robot (4WD Version) + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar
$747.17
V550 ROS2 Robot Educational Robot (4WD Version) + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar
$747.17
 V550 ROS2 Robot Educational Robot (Ackerman Version) + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar
$712.06
V550 ROS2 Robot Educational Robot (Ackerman Version) + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar
$712.06
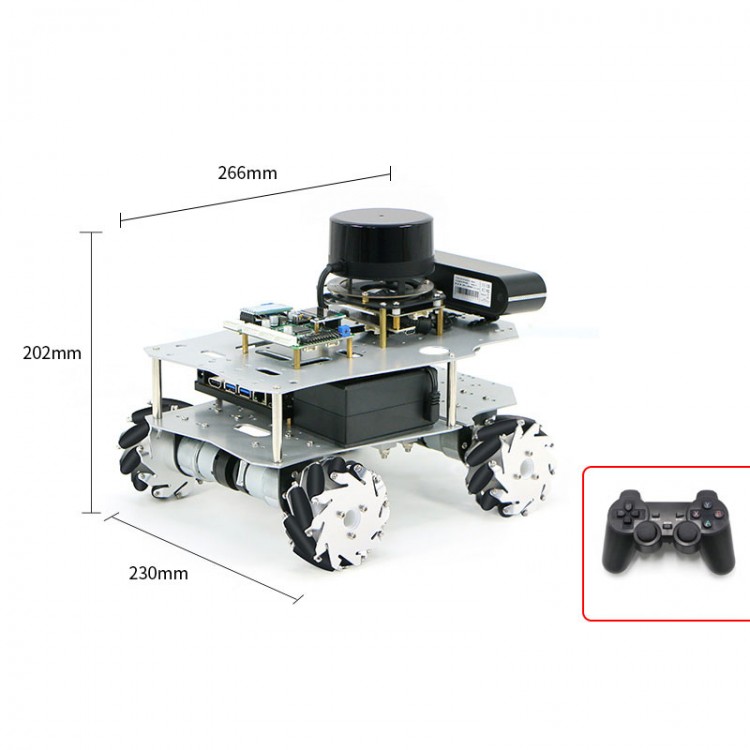
R550 ROS2 Robot (Mecanum Wheel Version) + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera
Advantages of Mecanum Wheel Version:
* 75mm metal Mecanum wheels and a swing arm suspension system
* With a USB wireless controller
* It includes robot chassis, lidar, ROS main controller, STM32 main control board, battery, and charger.
* Ready to run ROS system out of the box.
* ROS1 image is pre-installed by default. Please contact customer service if you need ROS2.
Description:
The R550 is a flagship product designed for ROS education and entry-level learning. It combines WHEELTEC's 10 years of chassis development experience with 6 years of ROS video tutorial expertise, achieving an ideal balance of educational performance, cost-effectiveness, and quality. The R550 offers multiple chassis options and comes with source code-level video tutorials (not just demonstrations). Equipped with high-performance lidar and camera accessories, it supports learning in areas such as mapping, navigation, and robot formation control. Technical support is provided to assist both beginners and advanced users.
Features:
WHEELTEC R550 ROS2 Educational Robot
* Over 16GB of code-level video tutorials
* Full support for ROS2
* Technical support provided
Advantages
* Full support for ROS2
* Provides melodic mirror
* Provides humble mirror
* The bottom layer is equipped with FreeRTOS
* For Jetpack5
* For Tensorflow
* For Pytorch
* ROS QT interface support
* Upgraded TOF lidar
* Supports robot formation control
* GMR encoder
* Textbook-level development manual
* Source code-level video tutorials
* Technical support provided
Support for ROS1 and ROS2 Systems
* The Raspberry Pi 5 (ROS main controller) supports the following system images: ROS1 Melodic and ROS2 Humble
* WHEELTEC provides a wealth of ROS2 video tutorials and continuous updates, making learning easy for users.
High-Quality Lithium Battery with Protective Casing
* Most smart robotic vehicles on the market use simple lithium battery packs wrapped in rubber, which have poor safety performance and are unattractive. Leveraging its scale advantage, WHEELTEC mass-produces lithium batteries with protective casings according to commercial robot standards. The batteries are equipped with built-in protections such as short-circuit, overcharge, and over-discharge safeguards, greatly enhancing safety.
Advantages of the Lithium Battery Compared to Polymer Batteries
* 18650 battery cells are equipped with built-in explosion-proof valves. When internal pressure becomes too high, the valve will pop out and the fuse at the top will melt to release the pressure. In contrast, polymer batteries will continue to expand and swell under high pressure, posing risks of rupture and explosion.
* The 18650 batteries can endure over 800 charge and discharge cycles with only a 20% capacity loss, giving them a theoretical service life of more than 3 years.
Magnetic Mount for Quick Battery Replacement
* The battery is secured to the chassis via magnetic attachment. During normal use, the magnetic force combined with a positioning block at the base ensures the battery remains firmly in place.
* Note: To remove the battery, simply lift it forcefully. This allows for quick battery replacement, greatly reducing downtime caused by charging or battery swaps.
High-Precision GMR Encoder
* The newly upgraded 500-line AB-phase GMR high-precision encoder offers precision more than 38 times greater than Hall encoders (most similar products on the market use Hall encoders). Robots equipped with the GMR high-precision encoder perform exceptionally well in low-speed navigation.
* Encoder Type: GMR (Giant Magneto-resistive)
* Rated Torque: 1 kg.cm
* Stall Torque: 4.5 kg.cm
* Gear Ratio: 1:30
* Rated Current: 360 mA
* Stall Current: 3.2 A
* Rated Voltage: 12 V
* Rated Power: 4.32 W
Patented Mecanum Wheel Chassis Technology
* All chassis are manufactured with full metal construction.
* The Mecanum wheels are made of metal, providing a substantial improvement in precision and durability compared to typical plastic Mecanum wheels, making them especially suitable for ROS2 robots. Additionally, the Mecanum wheel chassis is equipped with a high-precision suspension system normally found only in high-end, premium chassis.
* With a swing suspension system
* The clamp-type coupling is applied to the Mecanum wheel version chassis. You no longer need to worry about wheels falling off!
Proprietary Robot Swarm Control Algorithm
* By combining leader-follower algorithms with our company's innovative algorithms, we achieve highly stable robot swarm (formation) control. This technology has already been widely deployed across major universities in China. Robot formation control requires at least three robots to operate successfully.
Supports Bluetooth Wireless Code Programming
* The Bluetooth module provided with the robot chassis not only allows for remote debugging of the robot but also supports the use of the dedicated Bluetooth programming host developed by WHEELTEC for code flashing. The entire flashing process takes only a few seconds, greatly facilitating secondary development.
Key Features Introduction (Fully Open Source):
* RTABMAP Visual and Lidar 3D Mapping and Navigation: It supports pure visual mapping and navigation with RTAB, as well as lidar and visual fusion mapping and navigation.
* Classic 2D Lidar Mapping, Navigation, Obstacle Avoidance: ROS2 supports Gmapping, Cartographer, and slam_toolbox for mapping. And ROS1 supports Gmapping, Hector, Karto, and Cartographer for mapping, with capabilities for fixed-point navigation, multi-point navigation, and obstacle avoidance during navigation.
* ORB Visual Mapping: ORB-SLAM2 is an open-source visual SLAM framework that can compute the camera's pose in real-time while also performing sparse 3D reconstruction of the surrounding environment. In RGB-D mode, it provides real-world scale information.
* Graphical ROS QT Interface: You can deploy a QT graphical interface to enable one-click access to ROS functions, providing intuitive feedback on the robot's speed, battery status, etc.
* Real-world Autonomous Driving 3D Reconstruction: Optional multi-line LiDAR enables outdoor 3D mapping, bringing you closer to real autonomous driving.
* Autonomous Parking: Using proprietary patented algorithms combined with deep learning, the robot achieves fully automatic parking—an essential capability in autonomous driving.
* Lane Keeping: Core algorithms enable lane recognition and lane-keeping functions, crucial in the autonomous driving industry.
* Steering Decision-Making: Through proprietary patented algorithms and deep-learning-based recognition of lanes and traffic signs, the robot performs integrated decision-making—another core feature of autonomous driving.
* YOLO Traffic Sign Recognition: Step-by-step tutorials help you train your own deep learning model library to recognize traffic signs via an RGB camera, enabling basic autonomous driving.
* YOLO Object and Gesture Recognition: Popular deep learning model libraries are used to recognize everyday objects and gestures.
* ROS + TensorFlow Object Detection: Utilizes TensorFlow to recognize common objects and handwritten digits.
* RRT Autonomous Exploration Mapping: No manual control needed—the robot uses the RRT algorithm to explore and map the environment autonomously, save the map, and return to the starting point.
* Webcam Monitoring: View live camera images from the robot via any browser on a PC, enabling quick deployment of remote monitoring systems.
* RGB Camera Line Following: Follows ground lines using an RGB camera; integrates with LiDAR for obstacle avoidance during line following.
* LiDAR Following: The robot uses LiDAR to scan for nearby obstacles and follows the nearest object.
* LiDAR Angle Masking: All supported LiDARs can be optimized through the SDK to mask specific scanning angles.
* TEB & DWA Path Planning: Comprehensive video tutorials guide users through navigation path planning via engaging Python-based mini-games.
* DWB / MPPI / RPP Path Planning: Includes three controller plugins—DWB, MPPI, and RPP—for path tracking in different environments and for different robot chassis shapes.
* Full Coverage Path Planning: It automatically generates path points to cover a selected area completely for full-coverage navigation.
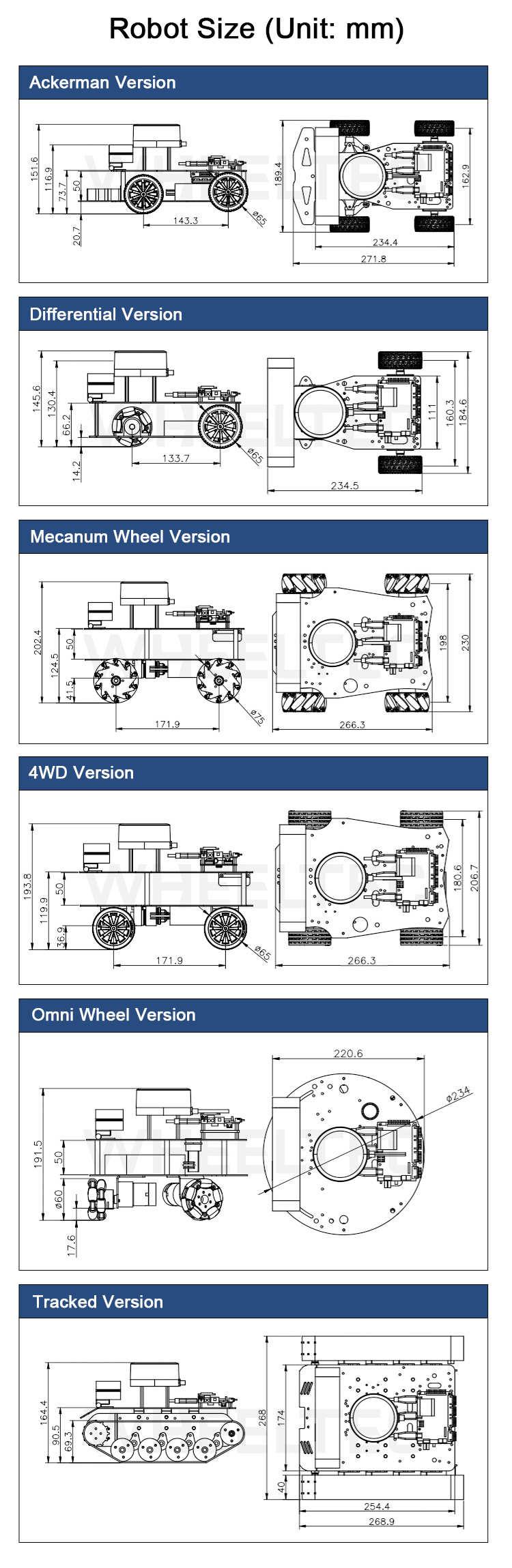
* Robot Chassis Kinematics Analysis: Covers motion analysis for various chassis types including Ackerman, differential, tracked, Mecanum, omnidirectional, and four-wheel drive.
* Path Recording and Playback: Records robot motion trajectories and replays them via the nav2 navigation framework.
* Accurate URDF Models: Provides detailed URDF models matching actual physical robots.
* Control Board Safety Circuit: Industrial-grade 4-layer PCB with compliant routing, real-time temperature monitoring via thermistors, and hardware-based motor over-current protection.
* Mobile ROS App for Mapping & Navigation: Control robot motion, mapping, and navigation through a dedicated ROS mobile app.
* Low-level Tuning App: App for Android and iOS enables parameter tuning, motion control via gravity sensing, and real-time waveform display.
Provides Source-Level Video and Documentation Tutorials:
Including but not limited to the following materials:
* Basic ROS Video Series
* Detailed Video on ROS SLAM Principles and Algorithms
* ROS Functional Development Code-Level Video Tutorials
* Basic ROS2 Learning Video Tutorials
* ROS2 Functional Development Code-Level Video Tutorials
* ROS2 Microphone Array Tutorial Video
* Deep Learning Tutorial for Autonomous Driving Sandbox Scenarios
* Moveit Robotic Arm Video Tutorial
* Kinematic Model for Wheeled Mobile Robots Video Tutorial
* STM32 Low-Level Source Code and ROS Communication Video Tutorial
* Autonomous Driving 3D Reconstruction Development Video Tutorial
* Basic Ubuntu Tutorials for ROS
N10P Lidar:
* Lidar: LSLIDAR N10P
* Measuring Range: 25 meters
* Scanning Frequency: 6–12 Hz (adjustable)
* Sampling Frequency: 5400 Hz
* Output Data: Angle, Distance and Light Intensity
* Angular Resolution: 0.4°–0.8° (adjustable)
* Ambient Light Resistance: 60KLux (supports outdoor use)
* Interface Type: Serial Port
* Motor Type: Brushless Motor
* 360° Scanning and Ranging: Yes
* Operating Principle: Time of Flight (ToF)
C70 RGB Camera with Wide FOV:
* Resolution: 720P
* FOV: H64.5° × V50°
* Frame Rate: 25 FPS
* Sensor Type: CMOS
* Driver Type: Supports UVC. Plug-and-play without drivers
* Interface Type: USB2.0
* Dimensions: 47 × 38 × 28.5 mm
* Net Weight: 50 g
Battery Parameters:
* Battery Model: E351S
* Battery Name: 12V Safety Lithium Battery Pack
* Battery Capacity: 5100mAh
* Charging Current: Recommended 2A
* Maximum Continuous Discharge Current: 6A
* Maximum Peak Discharge Current: 15A
* Battery Charge/Discharge Connector: DC5.5-2.1 Female
* Cut-off Voltage: 9V
* Nominal Voltage: 10.8V
* Fully Charged Voltage: 12.6V
* Dimensions: 85.6*61.6*42mm
* Weight: 377g
* Battery Protection: Short-circuit, over-current, overcharge, and over-discharge protection. It supports charging while in use. Built-in safety valve.
USB Wireless Controller:
* It supports USB wireless gamepad control, allowing stepless speed adjustment via joystick.
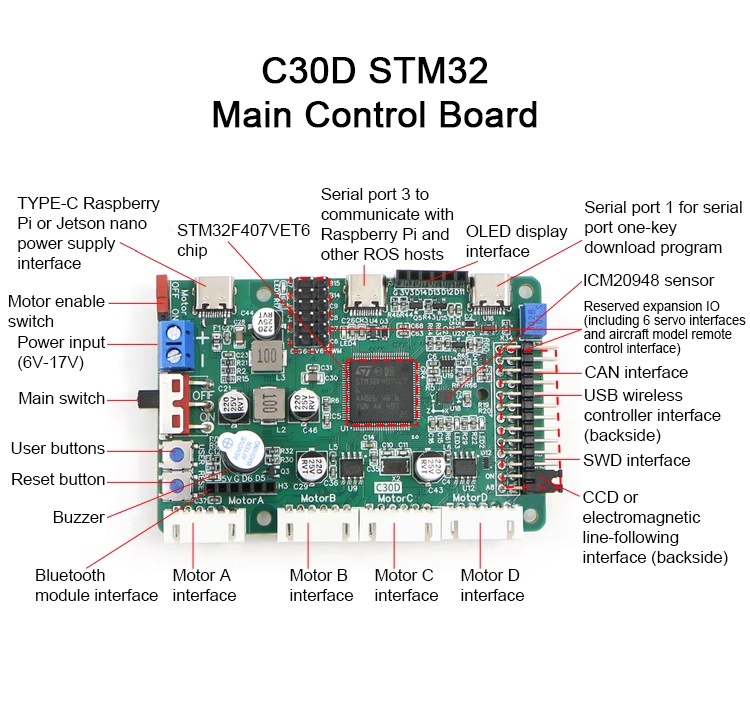
C30D STM32 Main Control Board:
* The motherboard is designed for smart robot cars and ROS development. One board can control multiple mainstream robot chassis types, including Ackerman, differential, Mecanum, omni-wheel, and tracked, with corresponding code provided. The motherboard can communicate with external devices via serial port or CAN and provides a 5V 5A interface to power devices like Raspberry Pi and Jetson Nano. Both the code and schematic are fully open-source.
Advantages of C30D STM32 Main Control Board:
* The carefully designed mini main control board matches the size and mounting holes of the Raspberry Pi.
* Main Control Chip: 100-pin STM32F407 with excellent expandability
* Remote Control Interface (for model aircraft): Supported
* Download Interface: Serial port one-click download or supports SWD interface download
* External Power Supply: Dual 5V 5A outputs
* Expansion Interfaces: CAN, CCD, electromagnetic line-following, etc.
* GPIO Reserved Pins: Dozens
* Reserved Servo Interfaces: 6 servo interfaces reserved (can connect a 6DOF robotic arm)
* Reserved Serial Ports: 4 serial ports
* Protection Circuit: Overheat protection, short-circuit protection, over-current protection
* Board Layers: Industrial-grade 4-layer board
Mecanum Wheel Version Chassis:
* 12V 30F MG513 Motors ×4
* 75mm Full-Metal Mecanum Wheels ×4
* Upper Full-Metal Plate ×1
* Swing Arm Suspension System ×1 Set
* 37 Motor Mount Brackets ×4
* Clamp-Type Couplings ×4
* Full-Metal Chassis Plate ×1
* Standard Fasteners and Connectors (Assorted)
Electronic Control:
* STM32 Main Control Board ×1
* Bluetooth Module ×1
* OLED Display ×1
* USB Wireless Controller ×1
* 12V 5100mAh Safety Lithium Battery (E351S) ×1
* 12.6V Fast Charger with 3C Certification ×1
* Magnetic Battery Base ×1
* Data Download Cable ×1
Packing List:
* 1 x Set of Robot
Packaging Details:
* G.W.: 3kg
Note:
* ROS1 image is pre-installed by default. Please contact customer service if you need ROS2.
* The circuit board, battery, and charger are the same across different robot configurations—only the chassis differs.
* The product will be assembled and debugged, so it is ready to use upon arrival.
* Voice module is optional.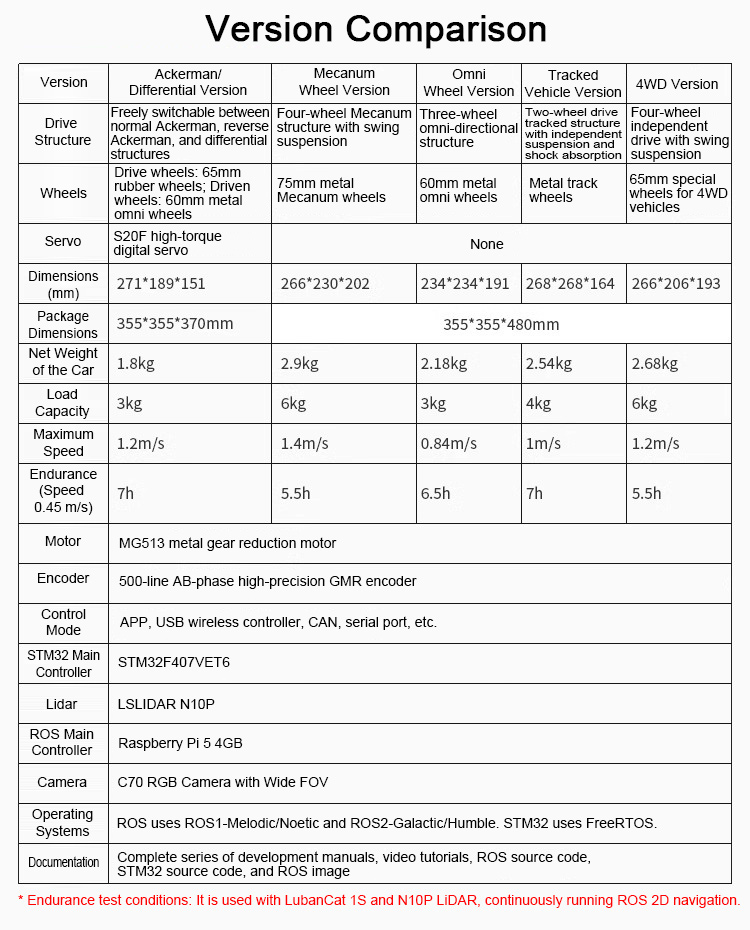
 + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera")


 + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera")
 + Raspberry Pi 5 4GB + 25m N10P Lidar + RGB Camera")


")

 + RGB Camera + Jetson Nano 4GB + 30m M10P Lidar")