| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $645.16 | $632.00 | $612.25 | $585.91 | Contact US |
 RoboMaster Lightweight NW-type Planetary Reduction Gearbox for Robot Driving Wheel with JA020XPO Rubber Seal Bearing
$89.51
RoboMaster Lightweight NW-type Planetary Reduction Gearbox for Robot Driving Wheel with JA020XPO Rubber Seal Bearing
$89.51
 RoboMaster Lightweight NW-type Planetary Reduction Gearbox for Robot Driving Wheel with KA020XPO Non Rubber Seal Bearing
$73.96
RoboMaster Lightweight NW-type Planetary Reduction Gearbox for Robot Driving Wheel with KA020XPO Non Rubber Seal Bearing
$73.96
 Robot Car Parts w/ Motors & 3DOF Robot Arm for 3-Mode Smart Cars (Differential + Ackerman + Mecanum)
$52.08
Robot Car Parts w/ Motors & 3DOF Robot Arm for 3-Mode Smart Cars (Differential + Ackerman + Mecanum)
$52.08
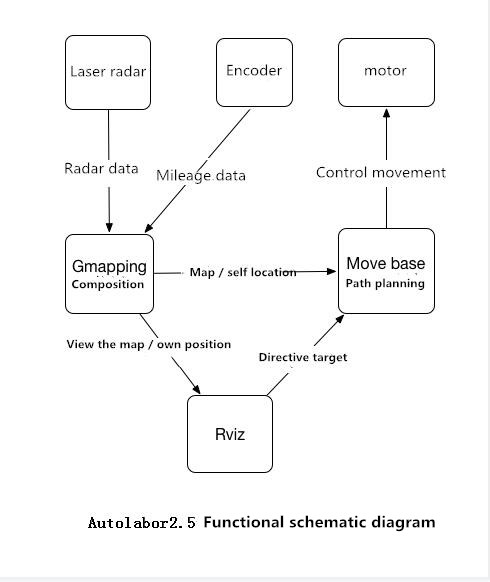
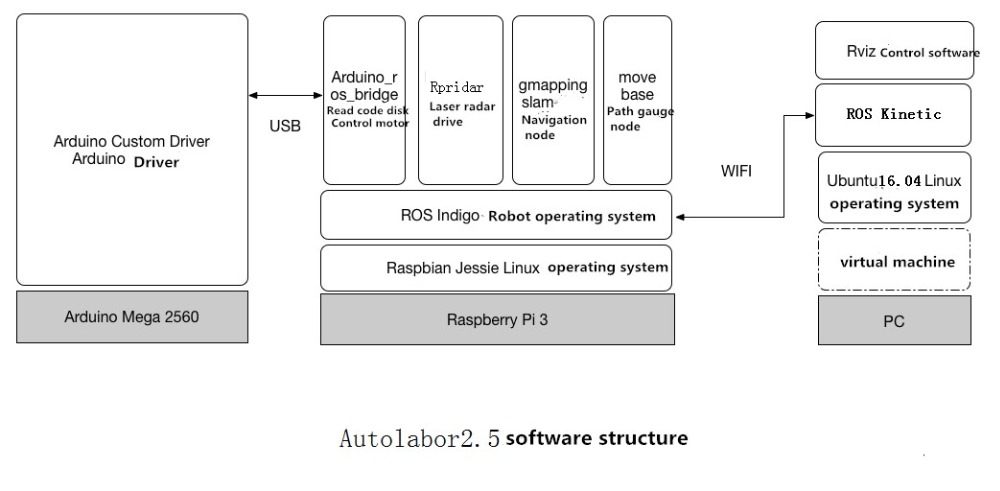
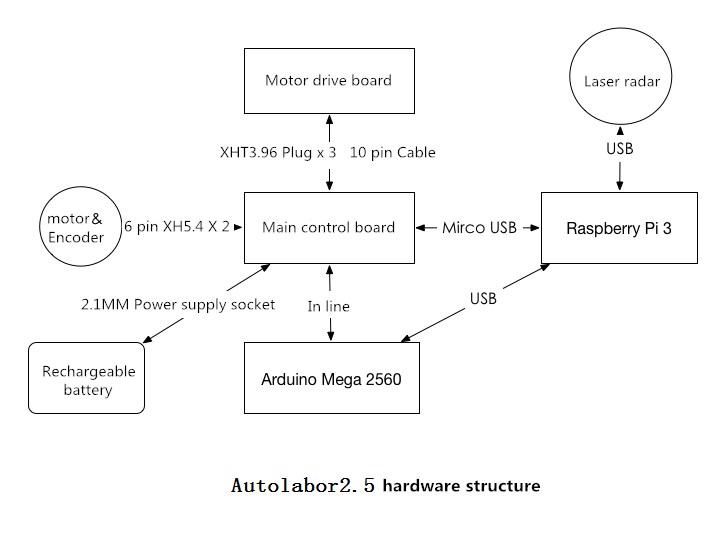
ROS Robot Car Autolabor2.5 Development Platform Wheeled Chassis SLAM Navigation w/ Raspberry Pi 3B
Description:
Autolabor is a widely used robot platform. Through Autolabor, you can quickly understand the use of ROS robot operating system, robot learning, motion control, SLAM and motion planning, ROS framework and related software and hardware development. We provide rich information, source code and online simulator (Autolabor Simulation), so that every customer can quickly get started and efficiently carry out secondary development, and give customers a better experience.
Specification:
Material: thickened acrylic
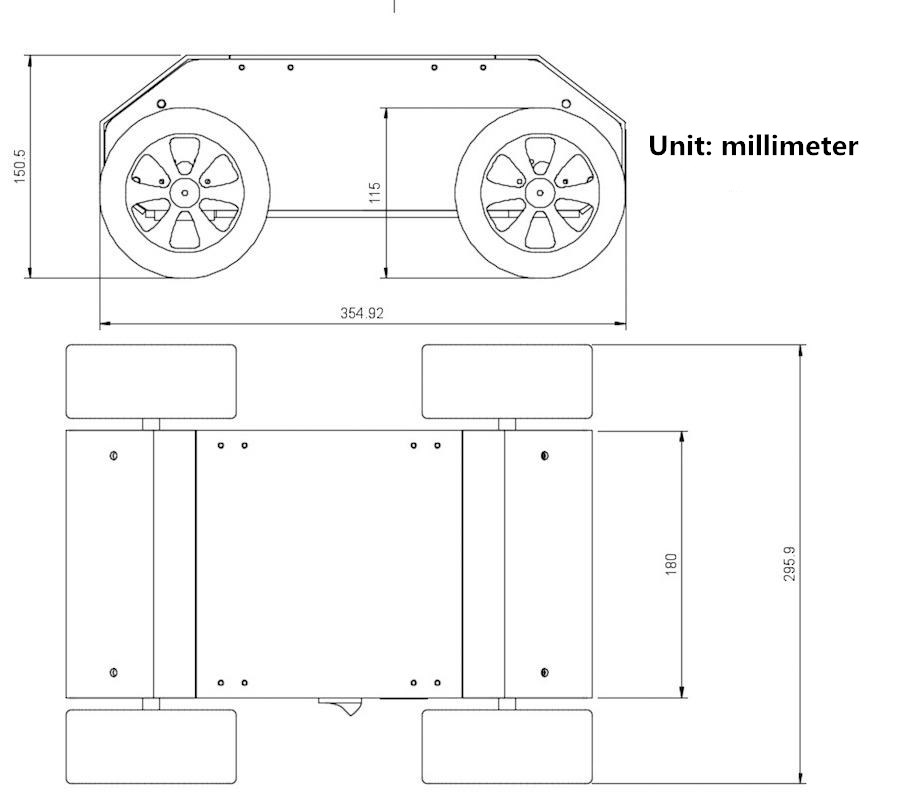
Size: 30 x 35cm
Weight: 4kg
Load: 8kg
Speed: 0.25m/s
Remote control: WIFI
Software system: Ununtu Mate 16.04
ROS version: Kinectic
Driving mode: four wheel drive, differential steering
Battery capacity: 12.6V 6800mAh
Open source: hardware circuit diagram, underlying driver software, SLAM algorithm, map remote control app (obtain from official website)
Board computer: Raspberry Pi 3B
SD card: 32G
Main control board: Arduion Mega 2560
Motor: 3W x 4
Mileage meter: ǀ ǀ line x168 deceleration ration encoder
Built-in software: Autolabor OS, Autolabor Remote App
Package List:
1 x ROS Robot Car