| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $575.85 | $564.10 | $546.47 | $522.96 | Contact US |
 C06B Main Control Board Master Control Board with STM32C8T6 & Reserved IO Outputs for Robotic Arms
$37.91
C06B Main Control Board Master Control Board with STM32C8T6 & Reserved IO Outputs for Robotic Arms
$37.91
 C63A Brushless Motor Version Robot Control Board with STM32F407VET6 Chip + 6 Ultrasonic Modules
$163.90
C63A Brushless Motor Version Robot Control Board with STM32F407VET6 Chip + 6 Ultrasonic Modules
$163.90
 C50C Brushed Motor Version Robot Control Board Robot Controller Board w/ Two 2CH D50A Driver Boards
$120.89
C50C Brushed Motor Version Robot Control Board Robot Controller Board w/ Two 2CH D50A Driver Boards
$120.89
ROS Robot Mecanum Car SLAMTEC A1 Standard Version + Depth Camera + For Raspberry Pi 4B 2GB
Advantages:
1. Always focus on the quality of teaching courses and start teaching from source code framework.
2. Provide an excellent education platform with high-cost solutions.
3. The robot-derived ROS functions are all independently developed codes.
4. The core components of the robot are all made of metal parts of model airplane.
5. When the robot is powered on, it will automatically open WiFi, and you can develop and learn after connecting, without any tedious configuration work.
6. Never encapsulate any interfaces on the native ROS framework so that native learning can be more thorough.
7. Carefully record code explanation and operation videos from the robot system level to make the understanding more comprehensive and thorough.
8. We have a more professional and comprehensive technical Q&A team, promptly asking questions and answering questions.
9. Answering questions in existing technologies, mainly responsible for circuit board design, embedded systems, deep learning, image processing, and ROS robot systems. Only professional Q&A will bring more professional absorption.
10. The whole structure of the robot is assembled by the factory, and the core components are assembled and tested by professional engineers.
11. The whole robot is assembled and tested before delivery.
Features:
- Visual SLAM navigation: Food delivery robot, AGV car, sweeping robot, delivery robot
- 3D depth mapping
- Lidar build map
- Path planning and automatic navigation
- Camera video surveillance
- Camera visual line inspection
- Indoor positioning dynamic obstacle avoidance
- Mobile APP mapping and navigation
- For OPENCV face detection
- ROS odometer
- Mecanum wheel lidar robot: Front torsion suspension, more accurate kinematics data
- Detailed video courses: ROS basic video course, ROS robot video course, laser SLAM algorithm course. All open-source code with explanation.
- Lidar and depth camera are fused to construct a three-dimensional map. Based on RTABMAP-VSLAM mapping, the robot can perform navigation and global relocation
- Core components of robot networking: Provide AP, Router, Client, Repeater, Bridge working modes. The router is installed inside the robot. In AP mode, the robot will automatically open the WIFI hotspot when it is powered on, and the host can connect to remote development. In the relay mode, it can be relayed to any network, which is convenient for networking, group control, management, and Internet access. Multiple WIFI routing modes, easy configuration on web pages, adapt to more robot debugging environments. TP-Link-WR702 supports more wireless routing modes, stronger speed, and larger network coverage.
- Four laser slam methods: Cartographer, Gmapping, Hector, and Karto.
- Support computer and mobile phone mapping and navigation.
- ROS robot depth camera component: equipped with high-end SP chip, can automatically adjust the shutter to optimize the image according to the environment, suitable for robot vision image processing. 1080P RGB ordinary camera, depth camera, dual stereo microphones.
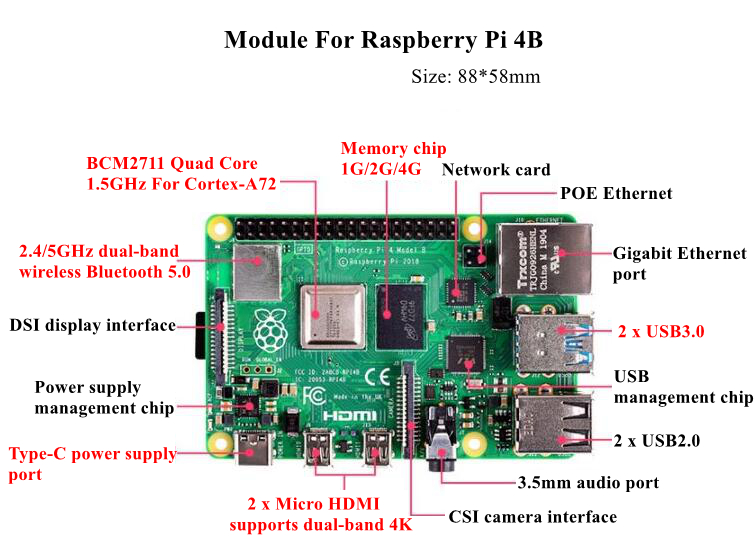
Faster Processor:
CPU computing speed is more than three times that of PI3B+.
① The new processor Pi4B model BCM2711, Pi3B+ is BCM2837B0.
② The new core processor core is upgraded from Pi3B+'s 4-core for CORTEX-A53 to 4-core for CORTEX-A72.
③ The new manufacturing process has been upgraded from the original 40nm to Pi4B's 28nm
④ The higher main frequency is increased from Pi3B+'s 1.4GHz to 1.5GHz
Technical Parameters:
- Robot model: HuanYuBot-H20X03
- ROS robot main control board: For Raspberry Pi 4B quad-core Cortex-A72
- Main control board SD card capacity: For 32GB
- Lidar: SLAMTEC Rplidar Al Lidar
- Bottom control board: STM32F405RGT6
- Kinematics model: Mecanum omnidirectional kinematics model
- Motor: 12V DC brush motor, 330 revolutions per minute
- Body material: 2.5mm sky blue high-strength aluminum plate (surface oxidation and sandblasting)
- Size: 30 x 23 x 22cm (length * width * height)
- Charger: 12.6V 2A charger
- Body weight: 2kg
- Maximum load: 3kg
- Encoder resolution: 1300 pulses per wheel revolution
- Camera: depth camera
- Voltage display: three-segment LED indicating power
SLAMTEC A1 Standard Version:
- Test radius: 12M
- Measurement frequency: 8000 times per second
- Scanning frequency: 5.5Hz
- Scanning time: 180ms
Package Included:
- 1 x Set of ROS Robot Car
Note:
- 12.6V 6000mAh battery is recommended. Battery is not included.
- It is assembled.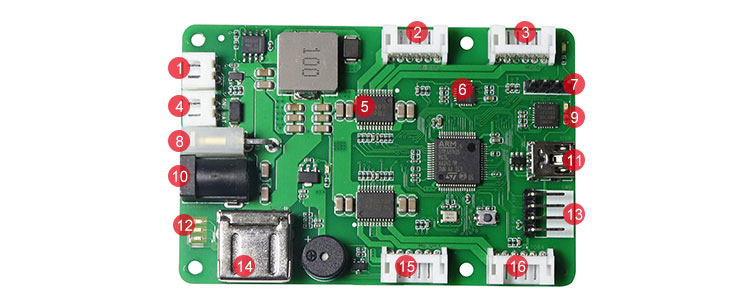
① Switch interface
②③ Motor encoder interface
④ Battery interface (Battery is not included)
⑤ Motor drive chip
⑥ IMU attitude sensor
⑦ Reserved serial port
⑧ 12V 5A reserved
⑨ CP2102 serial port chip
⑩ Charging port
⑪ Host computer communication interface
⑫ Three-segment battery indicator
⑬ SWD program download interface
⑭ Host computer power supply interface
⑮⑯ Motor encoder interface