| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $0.00 | $0.00 | $0.00 | $0.00 | Contact US |
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M9 GPS Module for FPV Racing Drone Flight Control
$215.64
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M9 GPS Module for FPV Racing Drone Flight Control
$215.64
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M10 GPS Module for FPV Racing Drone Flight Control
$198.15
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module + M10 GPS Module for FPV Racing Drone Flight Control
$198.15
 Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module for FPV Racing Drone Flight Control
$151.51
Holybro Pixhawk 6C Mini-B Flight Controller Module + PM06 14S Power Module for FPV Racing Drone Flight Control
$151.51
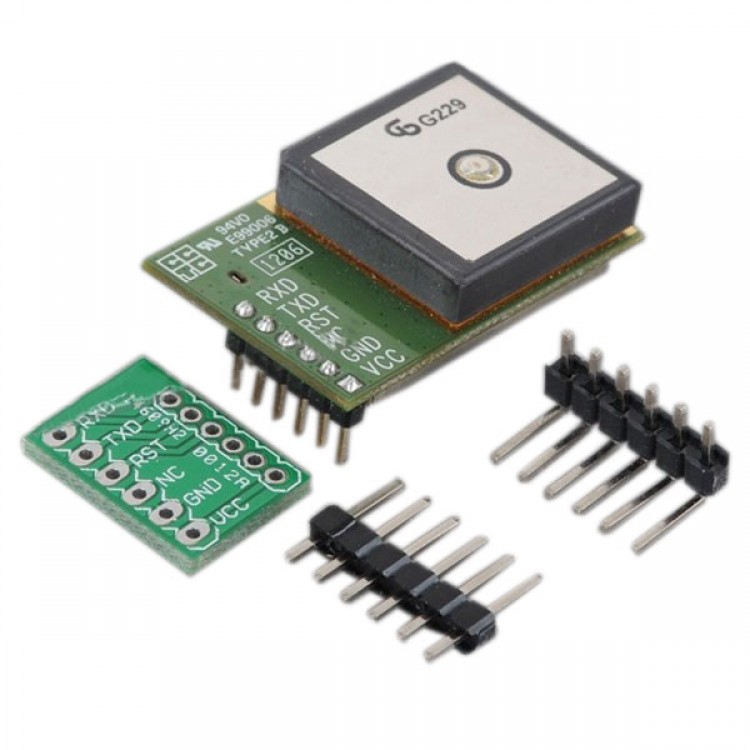
Skylab GPS Module MT3329 SKM53 with Embedded GPS Antenna Arduino Compatible
Description:
SKM53 Series with embedded GPS antenna.It is based on MediaTek3329 single-chip architecture.SKM53 can be applied in a portable device and receiver like PND, GPS mouse, car holder, personal locator, speed camera detector and vehicle locator.
Features
- Ultra high sensitivity: -165dBm
- 22 tracking/66 acquisition-channel receiver
- WAAS/EGNOS/MSAS/GAGAN support
- NMEA protocols (default speed: 9600bps)
- Internal back-up battery and 1PPS output
- One serial port and USB port (option)
- Embedded patch antenna 18.2 x 18.2 x 4.0 mm
- Operating temperature range: -40 to 85
- RoHS compliant (Lead-free)
- Tiny form factor 30mm x20mm x 11.4mm
Specifications:
|
Receiver Type |
L1 frequency band, C/A code 22 Tracking / 66 Acquisition-Channel |
|
|
Sensitivity |
Tracking Acquisition |
-165dBm -148dBm |
|
Accuracy
|
Position Velocity Timing (PPS) |
3m 3D RMS without SA 0.1m/s without SA 60ns RMS |
|
Acquisition Time |
Cold Start Warm Start Hot Start Re-Acquisition |
36s 33s 1s <1s |
|
Power Consumption |
Tracking Acquisition Sleep/Standby |
<30mA @ 3V Vcc 40mA TBD |
|
Navigation Data Update Rate |
1Hz |
|
|
Operational Limits |
Altitude Velocity Acceleration |
Max 18,000m Max 515m/s Less than 4g |
| Antenna Specifications |
OutlineDimension Center Frequency Bandwidth Impedance Axial Ratio Polarization |
18.2 x 18.2 x 4.0 mm 1575 ± 3 MHz 10 MHz min 50 Ω 3 dB max RHCP |
| Mechanical requirements |
Dimension Weight |
30mm x20mm x 11.4mm 9g |
| Power consumption |
VCC Current |
5V ±5% 55mA(typical) |
| Environment |
Operating temperature Storage temperature Humidity |
40 ~ +85 (w/o backup battery) 0 ~ +125 |
Arduino Code:
/*
RXD Arduino Pin 3
TXD Arduino Pin 2
RST Leave Open ? (Connect to a N/O momentary switch pulled low to reset?)
NC Leave Open
GND Ground
VCC +5
Make sure you download TinyGPS.h
*/
#include <TinyGPS.h>
#include <SoftwareSerial.h>
unsigned long fix_age;
SoftwareSerial GPS(2,3);
TinyGPS gps;
void gpsdump(TinyGPS &gps);
bool feedgps();
void getGPS();
long lat, lon;
float LAT, LON;
void setup(){
GPS.begin(9600);
Serial.begin(115200);
}
void loop(){
long lat, lon;
unsigned long fix_age, time, date, speed, course;
unsigned long chars;
unsigned short sentences, failed_checksum;
// retrieves +/- lat/long in 100000ths of a degree
gps.get_position(&lat, &lon, &fix_age);
getGPS();
Serial.print("Latitude : ");
Serial.print(LAT/100000,7);
Serial.print(" :: Longitude : ");
Serial.println(LON/100000,7);
}
void getGPS(){
bool newdata = false;
unsigned long start = millis();
// Every 1 seconds we print an update
while (millis() - start < 1000)
{
if (feedgps ()){
newdata = true;
}
}
if (newdata)
{
gpsdump(gps);
}
}
bool feedgps(){
while (GPS.available())
{
if (gps.encode(GPS.read()))
return true;
}
return 0;
}
void gpsdump(TinyGPS &gps)
{
//byte month, day, hour, minute, second, hundredths;
gps.get_position(&lat, &lon);
LAT = lat;
LON = lon;
{
feedgps(); // If we don't feed the gps during this long routine, we may drop characters and get checksum errors
}
}
(Writted by Warren)









")