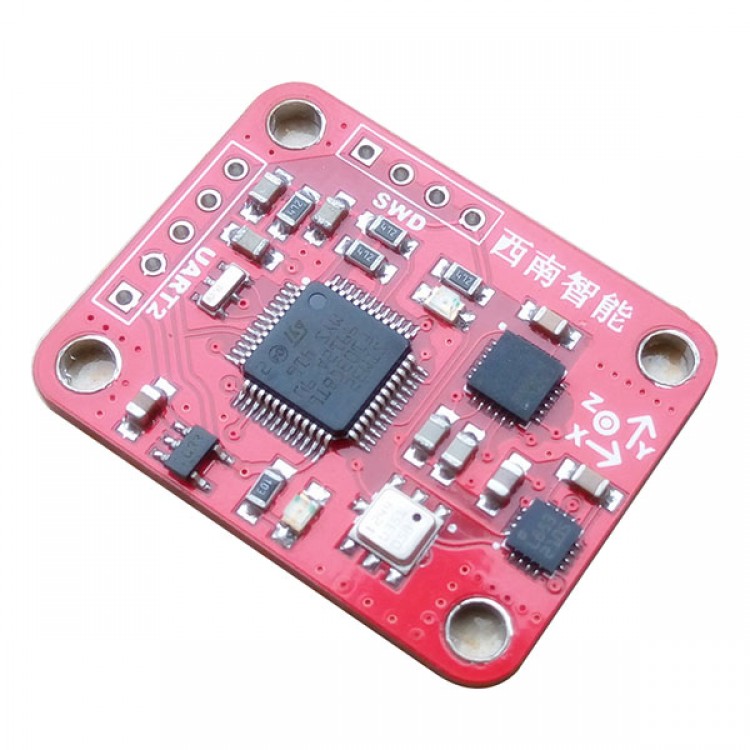
STM32 AHRS MPU6050 HMC5883 BMP180 Attitude Gyro/Accelerometer Module for FPV DIY
Function:
- Reads the MPU-6050 output triaxial angular velocity and triaxial accelerometer ADC values
- read the respective axes magnetometer HMC5883 the sensed value of the magnetic strength of the ADC
- Read the barometer BPM180 temperature and pressure and after correction procedures are real pressure altitude
- Run an IMU solver, get the current module pitch, roll, heading, altitude and temperature pressure
- The program will be considered after the individual sensor values gesture of reconciliation sent to the main port TXO output to the host computer. Waveform and each sensor values connected PC displays
- Compiler MDK: build environment: MDK-Lite Version: 4.23
Hardware consists of:
- MPU-6050 integrated 3-axis gyroscope and 3-axis accelerometer
- HMC5883L 3-axis geomagnetic sensor
- BPM180 barometric altimeter
- STM32F103C8T6 32-bit ARM CortexM3 processor clock running at 72M
Product Specifications:
- 32mm X 25mm
Download debugging interface connections:
- JTAG interface AHRS board
- 3.3V VCC
- GND GND
- SWDIO SWDIO
- SWCLK SWCLK
Communication interface:
- UART interface AHRS board
- 3.3 / 5V VIN
- GND GND
- TXD RXD
- RXD TXD
Set the serial port parameters:
- Baud Rate: 115200
- Data bits: 8
- Parity: None
- Stop bits: 1
- Flow control: None
Shipping list:
- STM32 AHRS MPU6050 HMC5883 BMP180 Attitude Gyro/Accelerometer Module
- Two pairs of curved straight pin
- Four pillars;
- Two connecting cables;
 BU-5 Bluetooth Module Radio Bluetooth Adapter Unit for Yaesu FTM-150R FTM-510DR Transceiver
$55.79
BU-5 Bluetooth Module Radio Bluetooth Adapter Unit for Yaesu FTM-150R FTM-510DR Transceiver
$55.79
 STF10M1000M-25 RF Power Amplifier 10-1000MHz 25W-30W Wideband RF Amplifier without Radiator and Cooling Fan
$490.69
STF10M1000M-25 RF Power Amplifier 10-1000MHz 25W-30W Wideband RF Amplifier without Radiator and Cooling Fan
$490.69
 STF10M1000M-25 RF Power Amplifier 10-1000MHz 25W-30W Wideband RF Amplifier with Radiator and Cooling Fan
$543.48
STF10M1000M-25 RF Power Amplifier 10-1000MHz 25W-30W Wideband RF Amplifier with Radiator and Cooling Fan
$543.48







 for Quadcopter")



