| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $288.59 | $282.70 | $273.87 | $262.09 | Contact US |
 TR500S 24V 300W DC Brushless Motor Tank Chassis Robot All-Terrain Chassis Rubber Track Assembled Load 50KG No Controller
$1,989.77
TR500S 24V 300W DC Brushless Motor Tank Chassis Robot All-Terrain Chassis Rubber Track Assembled Load 50KG No Controller
$1,989.77
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$273.65
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$273.65
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
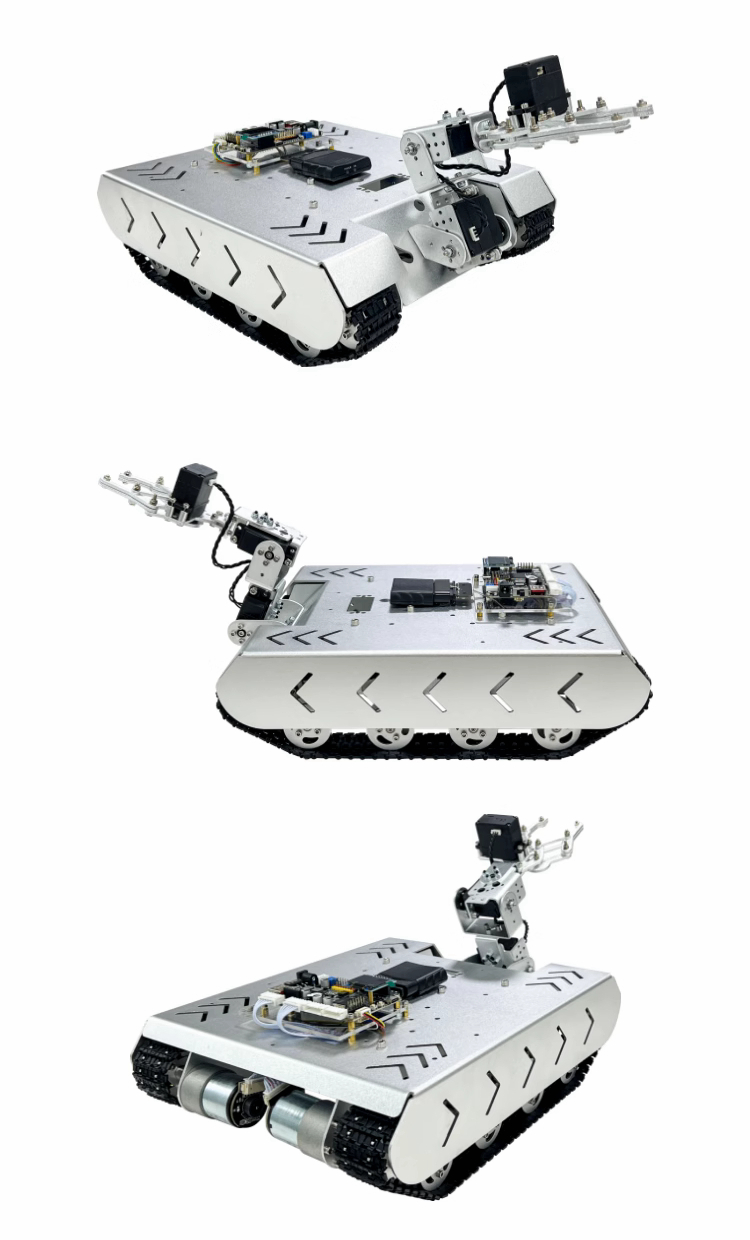
TS100L STM32 Robot Chassis ROS Robot Platform Assembled with Electronic Control & 11PPR Hall Encoder
Attention:
- The versions with electronic control support controller for PS2. If you need Bluetooth control, please contact customer service. The Bluetooth APP control cannot be used to control robotic arm.
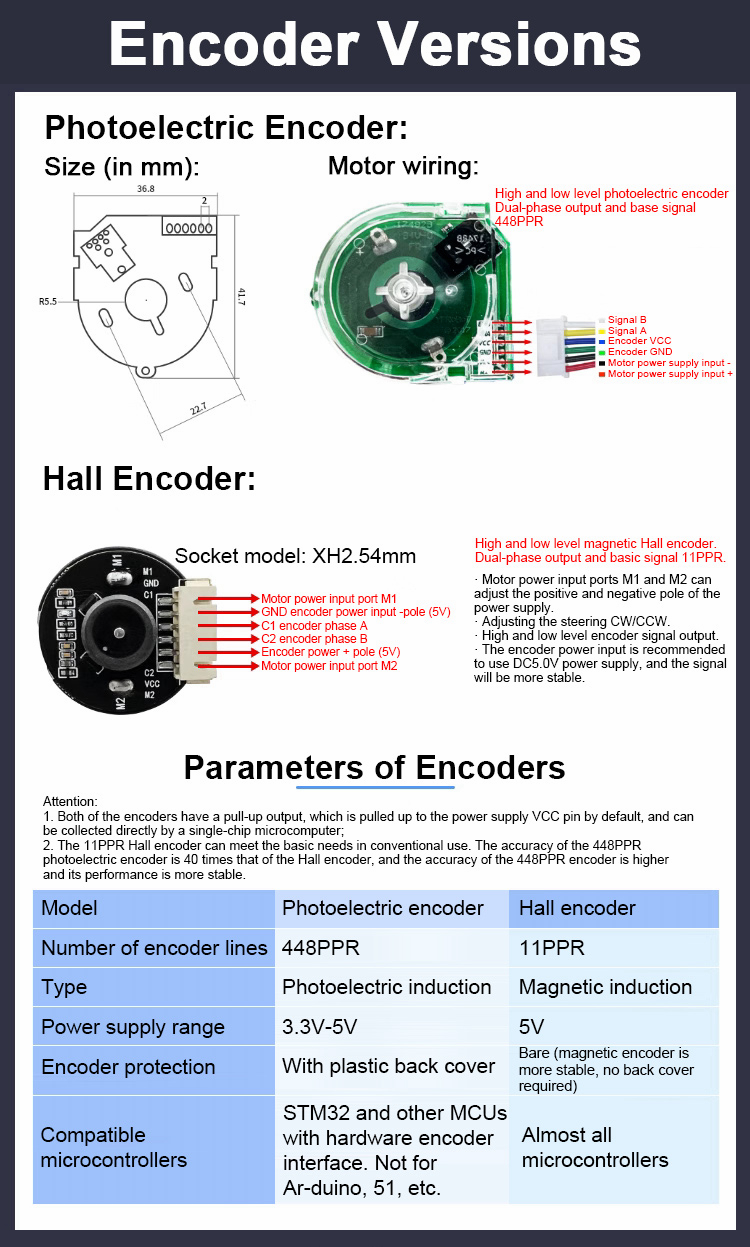
- Encoder versions: 11PPR Hall encoder can be used for basic development and learning such as regular laboratory teaching. The accuracy of 448PPR photoelectric encoder is 40 times that of the Hall encoder, and its accuracy is higher and the performance is more stable.
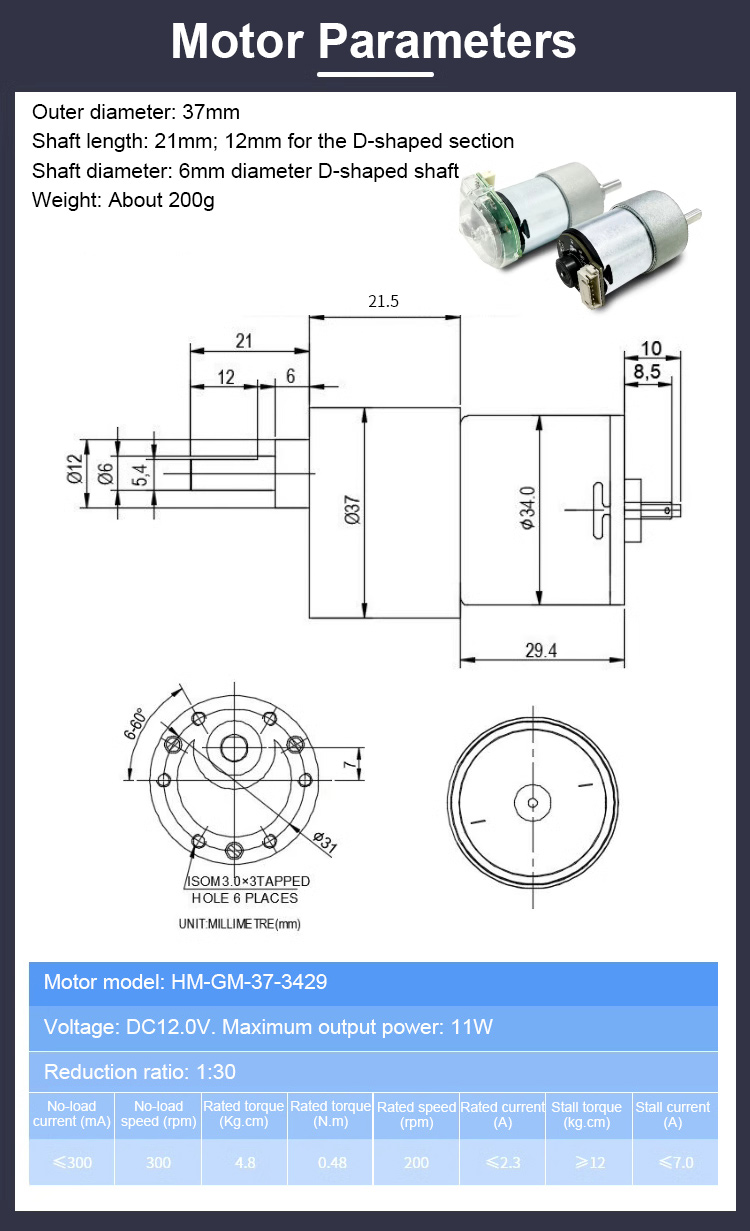
- 37 motor reduction ratio is 1:30 by default. If you need other reduction ratios, please contact customer service.
Version With Electronic Control:
- With chassis, two motors with cable, STM32 control board, controller kit for PS2, acrylic board and OLED screen
Features:
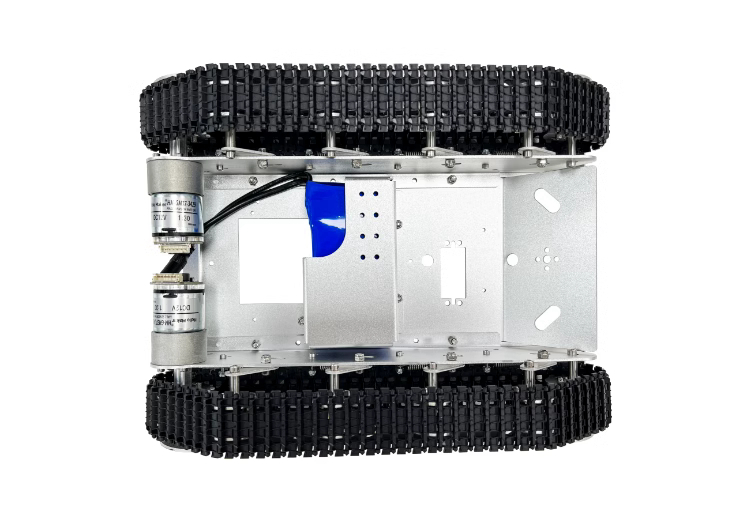
- TS100L ROS robot development platform: It is a tracked vehicle with independent shock absorbers
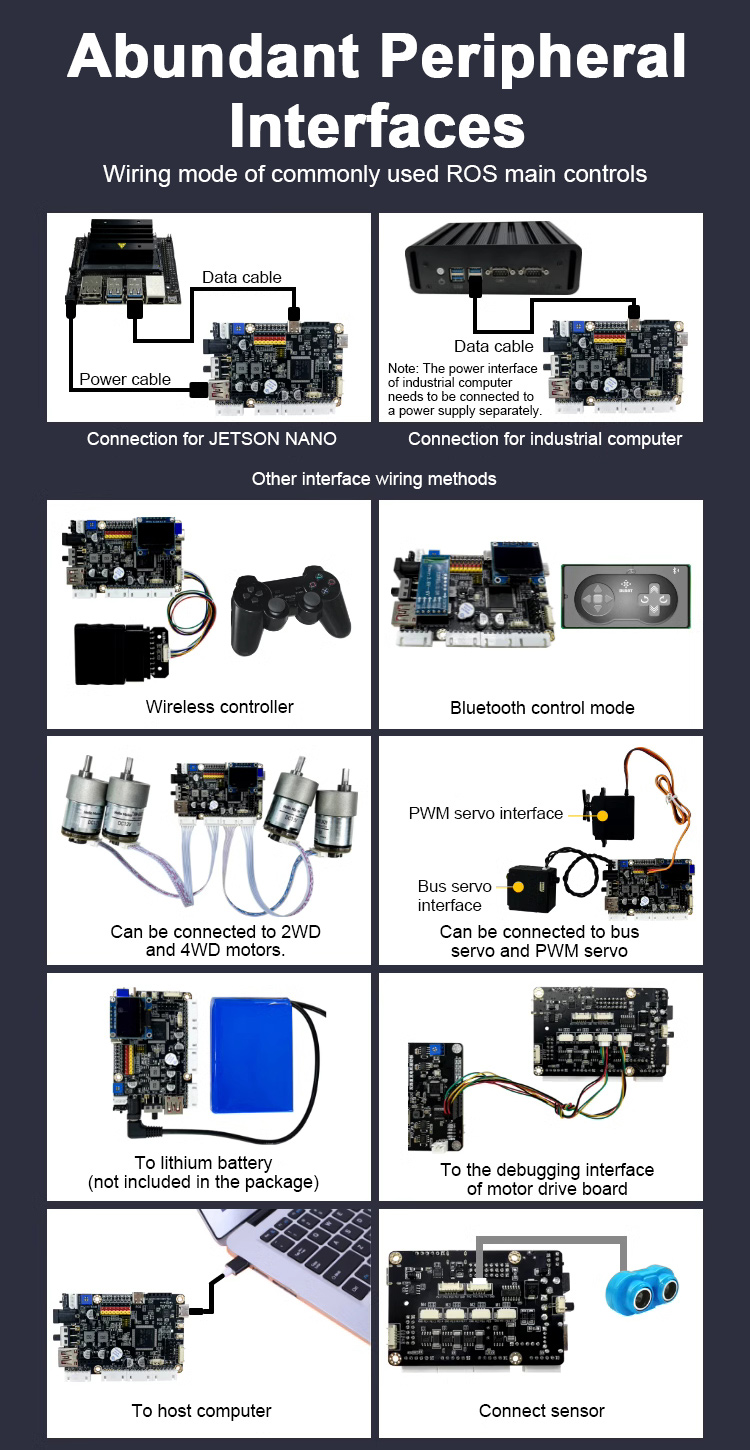
- Reserved serial port/CAN interface/control protocol and SDK driver package provided/host computer command control
- Supports for Raspberry Pi/Jetson Nano/direct control of industrial computer
- Supports ROS1 & ROS2 robot development. We provide 3D model diagrams, source code, schematics, a full set of open source development technical materials, and a large number of learning materials
Technical Parameters:
- Product name: TS100L ROS Chassis with Shock Absorber
- Body material: aluminum alloy with oxidized surface
- Motor: 2pcs 37 DC geared motors with encoding disk and 1:30 reduction ratio
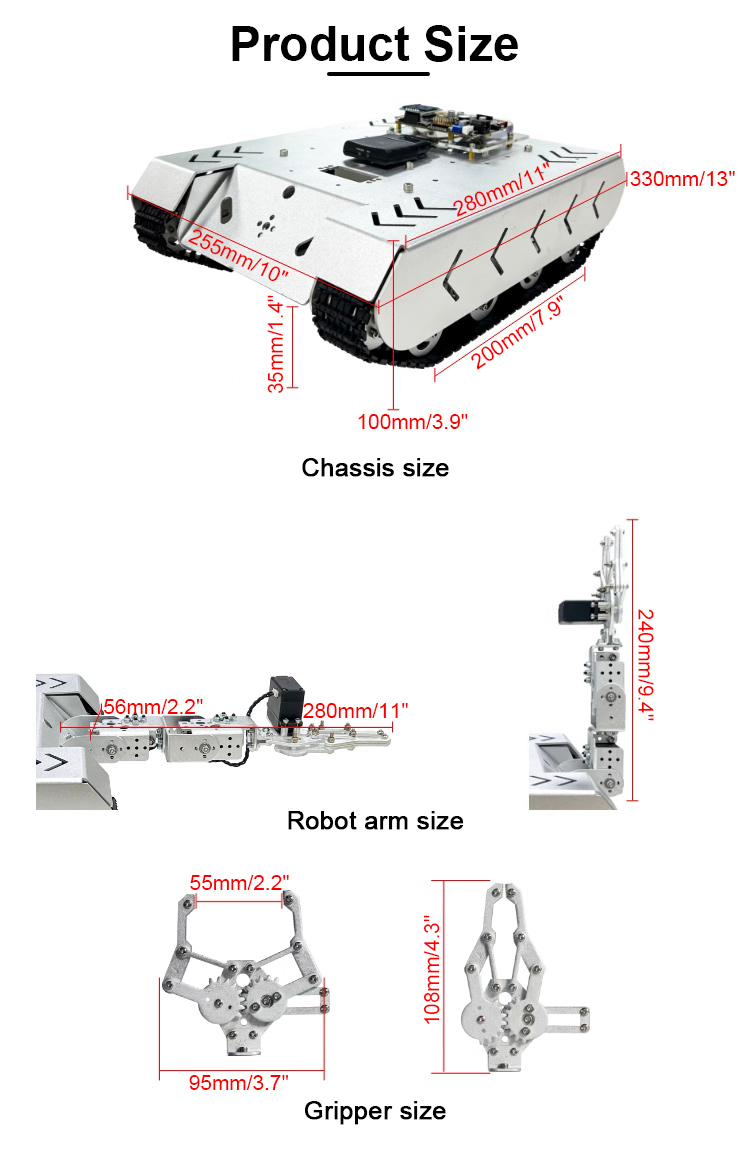
- Ground clearance: 35mm/1.4"
- The height at which the obstacle is spanned vertically: 50mm/2"
- Shock absorption method: 8 sets of independent suspension shock absorbers
- Power supply: 12V 12000mAh lithium battery with original charger
- Chassis weight: About 2.2KG/4.9LB (without the weight of electronic control)
- Product dimensions: 255 x 330 x 100mm/10 x 13 x 3.9"
- Load capacity: approx. 8kg/17.6lb
- Load speed: 0~0.70m/s
- Battery life: 4-5 hours
Control Parameters:
- Controller: STM32F407 ROS main control board
- Programming language: C
- Control mode: Wireless controller for PS2, Bluetooth APP (optional; for Android cellphones), serial port command of the host computer, etc.
- Materials: 1. Provide serial/CAN interface and communication protocol/SDK driver package to support secondary development; 2. ROS1 and ROS2 driver packages of the host computer and support the command control of the host computer; 3. Provide source code and schematics, a full set of technical development kits and learning materials.
Serial Bus Servo Parameters:
- Servo type: single shaft and dual shaft
- Product weight: 55g/0.1lb
- Rotation speed: 0.16sec/60° (4.8V) 0.15sec/60° (6V)
- Storage: Parameters can be saved when it is powered off /down
- Operating voltage: 5-8.4V
- Servo mode: 180/270° with adjustable speed
- Servo ID: 0-254 user settings
- Cable length: 14cm/5.5"
- Communication baud rate: 115200
- Dimensions: 39 x 20 x 40mm/1.5 x 0.8 x 1.6"
- Stall torque: 15kg.cm (6V) & 17kg.cm (7.2V)
- Gear type: Metal
- Servo accuracy: 0.24°
- Motor mode: Lap/Timing
- Read-back function: Support
- Control mode: Serial commands
- Parameter feedback: temperature, voltage and position
Package Included:
- 1 x Chassis
- 1 x Controller
- 1 x STM32 control board (with OLED and controller ports for PS2)
- 1 x Debugging cable
- 1 x Data cable
- 1 x Lithium battery kit (with charger)
- 1 x Acrylic board
- 1 x Screw part tool kit
Note:
- It has been assembled and debugged before delivery.
Packaging Details:
- Volume weight: 3kg

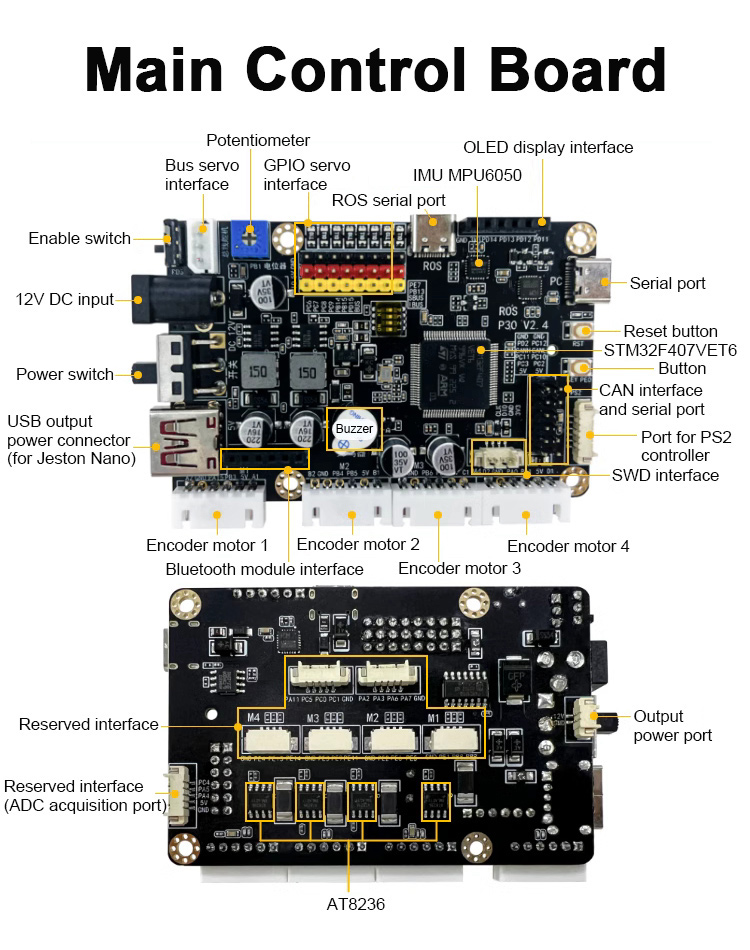
Features of Main Control Board:
1. STM32F407VET6 main control;
2. On-board MPU6050 six-axis sensor. It can send its own data through the serial port or CAN port;
3. Supports 4-way DC encoder motor (PID), the integrated motor driver chip is AT8236, and the maximum current is up to 2A;
4. Supports OLED screen to display the operating parameters of motors, voltage and the control status;
5. Support wireless controller for PS2 and Bluetooth to control chassis movement;
6. The reserved interface can be used as an expansion interface for sensor;
7. The USB interface supports the host computer to control and send its own data;
8. Provides SWD debugging interface and supports online debugging.