| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $2,881.94 | $2,823.13 | $2,734.91 | $2,617.28 | Contact US |
 TR500S 24V 300W DC Brushless Motor Tank Chassis Robot All-Terrain Chassis Rubber Track Assembled Load 50KG No Controller
$1,989.77
TR500S 24V 300W DC Brushless Motor Tank Chassis Robot All-Terrain Chassis Rubber Track Assembled Load 50KG No Controller
$1,989.77
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$273.65
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$273.65
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
Two-Tiered Differential Robot Car ROS Robot Assembled w/ 13.3" Touch Screen For Jetson Nano + A3
Advantages:
- High-precision encoder
- Lidar navigation
- All metal body
- Lithium battery with protection
- Bevel gear transmission
- Full set of open source materials
- Built-in PID controller
- CAN/Serial control
- ROS operating system
- For FreeRTOS system
Features:
- Including car chassis, bottom master (with drive), battery, charger, host for Ubuntu, depth camera, lidar, extension tier, touch screen and others
- Metal body and brand new high-end hub motor. Driven by brushless motor
- Artistic green light strips. With simple and elegant appearance. Green light strip on both sides of the body
- Long endurance time. Under light load conditions it can last for 28.5 hours
- Adjustable camera angle. The angle of the camera can be adjusted regardless of whether it is in line patrol, follow, or visual slam mode. The camera is installed on the car without blocking the line of sight
- Optional touch screen and wireless keyboard. The robot can be debugged through the 13.3" touch screen and wireless keyboard (instead of a mouse). Through the touch screen and keyboard, you can open ROS, install software, configure or connect to wifi and operate. It is easy to use
- ROS master: for Jetson Nano
- Bottom master: 32F103RCT6 (based on operating system for FreeRTOS)
- Operating system: for Ubuntu 18.04 + ROS melodic
- Camera: Astra series depth camera
- Functions: remote control, lidar mapping and navigation, visual mapping and navigation, multi-point cruise, lidar follow, depth vision follow, visual line patrol, APP image transmission, etc.
- Open source: open source the full set of underlying code for the above functions, ROS source code, development manual, video tutorial
- Provide Bluetooth & WIFI version APP (supporting for Android and IOS). 1. Support gravity sensor remote control and two-hand button remote control mode. 2. Support 5-channel waveform display interface, you can view the waveform at any time without a data cable. 3. Support 9-channel parameters adjustment interface and online adjustment of PID parameters. 4. Optimize alarm mechanism, APP accurately push low-voltage alarm notifications. 5. Support BLE Bluetooth 4.0 module
- Support remote control of airplane model. Built-in model airplane remote control interface, plug in a model airplane remote control and it can be controlled normally
- Support control via a wired controller for PS2. Built-in interface and program. Just connect it to a remote control to use
- Humanized design and multiple protections. Reverse connection protection, over current protection, short circuit protection, electrostatic protection, CAN controller and integrated MPU6050
- Download via a MicroUSB data cable. We provide a one-click download function. Using a MicroUSB data cable, you can download programs and communicate with serial port
Function List:
- Low-level ROS serial communication
- Reserved CAN communication interface
- IMU and mileage data feedback
- Voltage detection and voltage alarm
- MPU6050 six-axis attitude reading
- Support serial port one-click download
- AI radar frequency stepless adjustment
- Gyro zero drift removal
- Keyboard Node Control
- APP gravity sensor control
- APP adjusts PID parameters
- Application and Tutorial
- Robot dynamic obstacle avoidance
- Robot fixed-point navigation and multi-point navigation
- TEB and DWA path planning
- ROS APP image transmission and control
- WEB browser displays camera image
- Lidar mapping navigation
- Rtab pure visual mapping navigation
- Rtab vision + radar mapping navigation
- For Gmapping
- For Hector mapping
- For Karto build map
- For Cartographer
- Object Recognition for Tensorflow
- Lidar Follow
- Deep Vision Follow
- KCF follow
- AR tag recognition
- RGB visual line patrol (integrated radar obstacle avoidance)
- ROS APP mapping
- ROS APP navigation
- RRT independent mapping
- Multi-robot formation
Key Functions:
- For rtabmap vision and lidar mapping navigation. Support for visual SLAM, gmapping, hector, karto, Google Cartographer and other algorithms to create maps, supporting fixed-point navigation and multi-point navigation
- Support APP to control, view images, build maps, and navigate. Realize car mapping and 2D navigation functions through APP for Android
- RRT independently explores and builds maps. No need to manually control the car. Just use the RRT algorithm to autonomously complete the exploration map, save the map, and return to the starting point
- Multi-robot formation. Multi-machine coordinated operation and distributed formation control, supporting single-point and multi-point navigation
Product Parameters:
- Model: S100 (DIFF5)
- Drive structure: differential structure
- Wheels: Driving wheel: 5" brushless hub motor; driven wheel: 2" universal wheel
- Servo: None
- Car weight: about 15kg/33.1 lb
- Load capacity: less than 60kg/132.3lb
- Maximum speed: 2.4m/s
- Endurance at light load: about 28 hours
- Endurance at load 10kg/22 lb: about 20 hours
- Motor: WM050S
- Encoder: 1024 lines
- Control method: APP, wired controller for PS2, CAN, serial port, etc.
- Bottom master: 32F103RCT6
- Lidar: SLAMTEC A3
- ROS main control: for Jetson nano
- Camera: Astra series RGBD depth camera
Depth Camera:
- Depth resolution: up to 640x480
- RGB resolution: up to 640x480
- RGB sensor's FOV (HxV): 63.1° x 49.4°
- Depth sensor's FOV (HxV): 58.4° x 45.5°
- Monocularstructured light: monocular structured light + monocular RGB
- Deep frame rate: up to 30fps at 640x480
- RGB frame rate: up to 30fps at 640x480
- Depth range: 0.6m to 4m/2-13.1ft
- Dimensions (Dia.xH): 165 x 40 x 30mm/6.5 x 1.6 x 1.2"
- Data transmission interface: USB2.0 and above
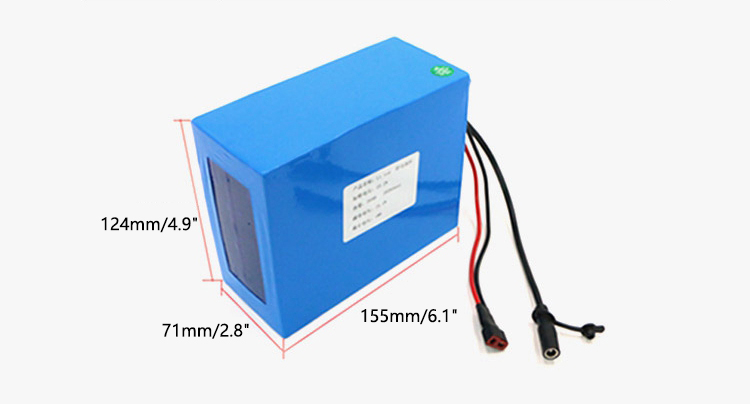
Battery:
- Equipped with a special charger with multiple protections such as overdischarge, overshoot, short circuit and overvoltage
- Battery pack: 22.2V 20000mAh
- Dimensions: 155 x 124 x 71mm/6.1 x 4.9 x 2.8"
- Plug: DC5.5 charging plug and T-shaped discharge plug
- Discharge performance: 60A continuous discharge
- Weight: 2.4kg/5.3 lb
Interface Description:
- CAN: The mobile platform can receive commands from CAN port, and can also send its own data (odometer and IMU) through the CAN port.
- Serial port: The mobile platform can receive commands from serial port, or send its own data (odometer and IMU) through the serial port.
- USB interface: used to connect to a computer, download the program with one key, receive the command control sent by the computer, and send its own data (odometer and IMU) to the serial port.
- Bluetooth (or wifi): It can send its own information to APP, can receive APP remote control commands, and can adjust PID parameters.
- Interface for PS2: Provide socket for PS2 controller and code. Just plug and play.
- SWD interface: SWD interface is provided for online debugging.
Open Source and Algorithm Description:
- Provide the complete source code of mobile platform and the schematic diagram of the controller. Provide detailed communication protocol of the interface and development manual. In addition, there are PID development notes and video tutorials.
- The mobile platform is mainly to solve the problem of "making wheels" in everyone's projects. With built-in PID closed-loop control and kinematics analysis, it can receive commands from serial port and CAN or even laptop.
Information Description:
- The data is completely open source and supports secondary development
- Provide ROS source code package. The ROS source code can quickly help you connect the car to the ROS system, and provide technical support for STM32, ROS, Linux, and SLAM
- Provide a rich ROS introductory manual
- Code-level ROS development manual
- Starter manual for gazebo. Using standard paper format, it covers ROS basics, STM32 low-level control, ROS development and tutorials for Ubuntu
- Deep learning video tutorial based on autonomous driving sand table scene (Chinese and English subtitles)
- For Moveit robotic arm video tutorial (Chinese and English subtitles). Streamline code routines, rviz visual interface, take you into the robotic arm learning world for moveit
- ROS SLAM principle and algorithm video tutorial (Chinese and English subtitles)
- ROS basic video tutorial (Chinese and English subtitles)
- STM32 bottom source code and ROS communication video tutorial (Chinese and English subtitles)
- ROS-related basic tutorial for Ubuntu (Chinese and English subtitles). Quickly grasp the basics for Ubuntu related to ROS, and improve the backup and programming process for raspberry pi/jetson nano, etc.
- ROS function development code-level video tutorials (some videos have Chinese and English subtitles). Code analysis of core functions such as ROS mapping and navigation
- ROS audio and video tutorial (Chinese and English subtitles). Provide basic application tutorials and code analysis combining ROS voice and for iFlytek
- Thematic video tutorials on motors, servos, PID, etc. Principle of motor and servo, PID principle and its C language implementation, etc.
Package Included:
- 1 x Set of ROS Robot
Note:
- It is assembled and has been debugged. It is ready to use.