Tags: Digital Servo
| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $10.78 | $10.56 | $10.23 | $9.79 | Contact US |
 Dynamixel XL-Series Digital Servo Motor XL430-W250-T 1.5N.m Servo Motor Suitable for Robot Joints
$95.49
Dynamixel XL-Series Digital Servo Motor XL430-W250-T 1.5N.m Servo Motor Suitable for Robot Joints
$95.49
 DYNAMIXEL XC330-M288-T 0.930Nm Coreless Servo Motor w/ Metal Gear for LEAP Hand & Machine Learning
$160.99
DYNAMIXEL XC330-M288-T 0.930Nm Coreless Servo Motor w/ Metal Gear for LEAP Hand & Machine Learning
$160.99
 FPX330-H101 4PCS Set Servo Mounting Kit Exclusive Servo Hinge Frames and Idler Set for DYNAMIXEL X330
$28.42
FPX330-H101 4PCS Set Servo Mounting Kit Exclusive Servo Hinge Frames and Idler Set for DYNAMIXEL X330
$28.42



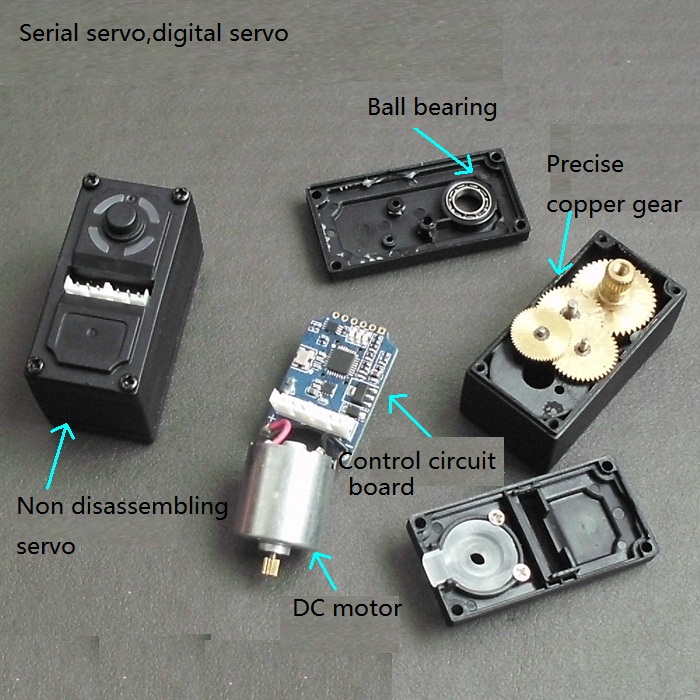
Product Description:
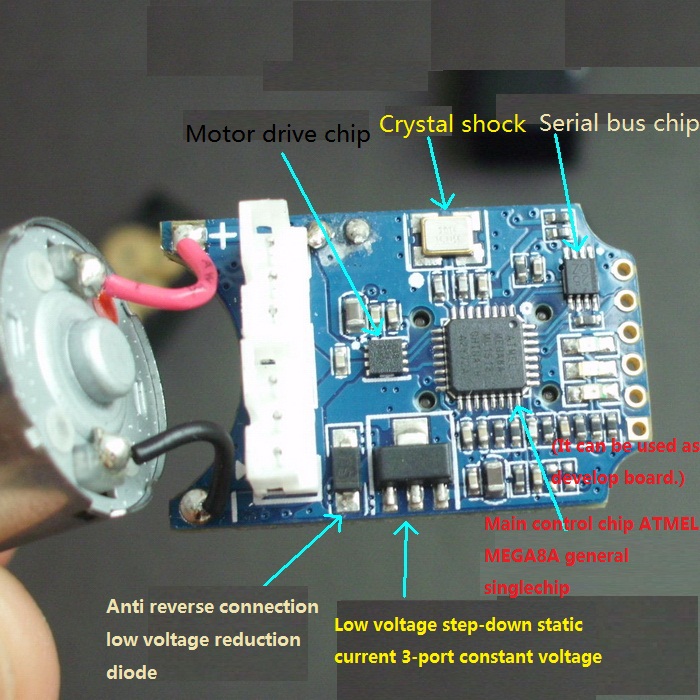
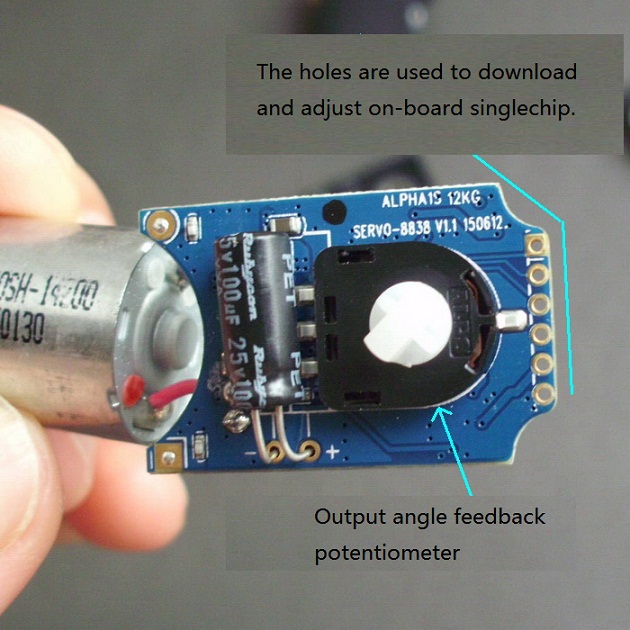
- It uses chip singlechip MEGA8A,is a kind of micro servo motor,precision decelerating motor,a built-in control board for receiving instructions and control reduction motor
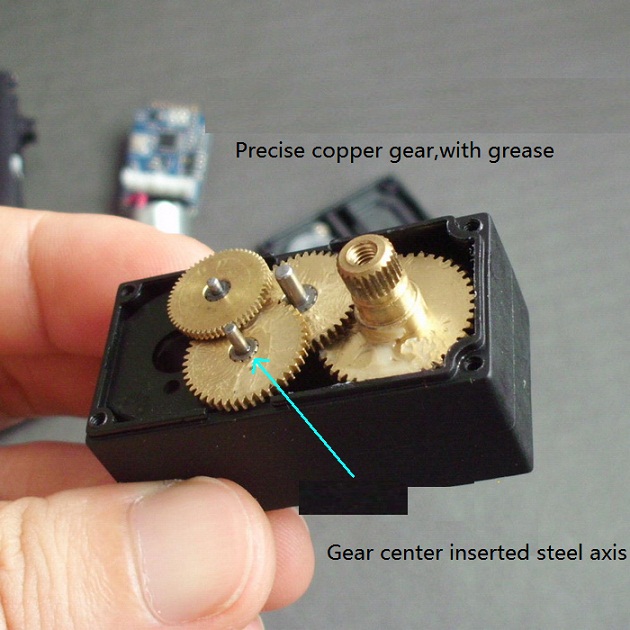
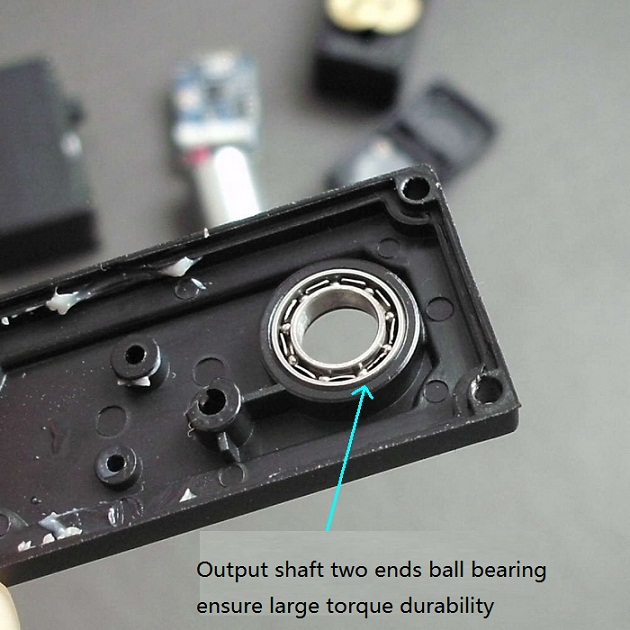
- All copper gear,output shaft has two ball bearings.
- Serial bus servo is a complex semi duplex communication protocol,The servo of each machine has the only ID.The main control board can communicate with all servos with a signal cable.
Specification:
- Mode:UBT12HB
- The max output torque:12kg.cm
- Weight:55g
- Gear reduction ratio:1/333
- Rated voltage:7.4V
- Input voltage:6V-9V
- Output torque(kg.cm):6.5V:8kg-cm;8.5V:12kg-cm
- Rotation speed (s/60 degree):6.5V:0.238sec/60 degree;8.5V:0.198sec/60 degree
- Accuracy:no load accuracy:1/3 degree;load accuracy:1 degree
- Angle range:240 degree (plus deviation +-30 degree,actural 300 degree)
- Working voltage range:6~8.5V(typical value:7.6V)
- Working current:full load 0.9A,locked rotor 2A.
- Working temperature:-5℃~+85℃
- Working instructions:digital format
- Protocol:
Baud rate:115200
Data bit:8
Stop:1
Check:0
Flow control:NONE TTL multi-layer connection,shared-bus
ID:1-240
Feedback:position:deviation adjustment,version information
Serial parameter:115200,8,n,1,1
Control:green PCB/blue PCB (optional)
Protocol analysis method:(need robot)
FA AF 01 04 00 00 00 00 05 ED switch on led light
FA AF 01 04 01 00 00 00 06 ED switch off led light
Write servo:FA AF id 01 angle ? ? ? SUM ED
Servo response:FA AF id AA ? ?real angle sum ED
Read data:FA AF id 02 00 00 00 00 SUM ED
Present experiment order (CD order is modification servo ID.)
Order can do experiments in 01..FF sequence.
Frame header:FA AF;frame ender:ED,SUM=ID+order+parameter,get the lowest 1 byte
Frame header (2 byte) ID(1 byte) order(1 byte) parameter (4 byte) SUM(1 byte)frame ender(1 byte)
Communicaton protocol format (length:10 byte)
Initialization,electricity is on.And then separate it and control single servo with computer TTL.
Connect computer TTL serial to the servo port.The computer (sscom32 serial software) can record it to the file when playing robot.
Protocol analysis method:(need robot)
Modify ID:FA AF ID CD 0 newid 0 0 SUM ED
Note:The servo is serial bus servo,not analog proportion servo.The connecting cables,rocker arms and screws are not included.
Package List:
- 1 x UBTECH UBT12HB ALPHA1S Digital Servo















