| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $14.90 | $14.59 | $14.14 | $13.53 | Contact US |
 H2MD DC24-120V 6A Engraving Machine CNC Stepper Motor Driver Module Support Phase Dislocation Protection
$45.54
H2MD DC24-120V 6A Engraving Machine CNC Stepper Motor Driver Module Support Phase Dislocation Protection
$45.54
 ZM-3H2080 24V High Performance 3-Phase Stepper Motor Driver Controller AC80-220V for 86-130MM Stepper Motors
$166.32
ZM-3H2080 24V High Performance 3-Phase Stepper Motor Driver Controller AC80-220V for 86-130MM Stepper Motors
$166.32
 ZM-3H2080 12V High Performance 3-Phase Stepper Motor Driver Controller AC80-220V for 86-130MM Stepper Motors
$166.32
ZM-3H2080 12V High Performance 3-Phase Stepper Motor Driver Controller AC80-220V for 86-130MM Stepper Motors
$166.32
Upgraded Version CNC Engraving Machine TB6600 32 Subdivision 4.0A Stepper Motor Driver Controller for 42/57
Features:
- Power supply DC 9V-42V
- H bridge bipolar constant current drive;
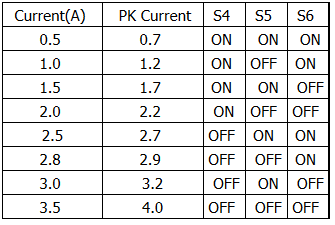
- Eight kinds of optional output current and the maximum one is 3.5A;
- 6 kinds of subdivision mode for option, and the max. one is 32;
- Input signal high-speed photoelectric isolation;
- Standard common anode single pulse interface;
- Offline retention function;
- Semi enclosed casing can adapt to more stringent environment;
- Provide energy saving half automatic current lock function;
- Built-in temperature protection and over current protection.
Terminal definition
Signal input terminal:
1.CP+: pulse signal input positive
2.CP- pulse signal input negative
3.DIR+: motor positive, inversion control positive end.
4.DIR-: motor positive inversion control negative end.
5.EN+ motor offline control positive end.
6.EN-: Motor off-line control negative terminal.
Motor winding connection:
- A+: connect to the motor winding A+ phase
- A-: A- is connected with the motor winding.
- B+: B+ is connected with the motor winding.
- B-: B- is connected with the motor winding.
Working voltage:
- VCC: positive of the DC power supply (Note: 10V < VCC < 42V).
- GND: the negative of DC power supply.
Signal input optocoupler isolation connection
There are two kinds of connection methods for the input signal interface: the user can use the method of common anode or common cathode.
1, Common anode connection: connect the perfectionist CP +, DIR+. / respectively to the power supply to the control system, if the power supply is 5V can directly access, if the power supply is greater than 5V must be external plus a current limiting resistor R to ensure to Internal Drive Optocoupler provides 8 - 15mA of drive current. Pulse input signal is accessed via CP-; at this point, DIR-, EN- is active at low level.
2, Common cathode connection method: link the CP-, DIR-, EN-, to the ground end of control system (SGND is isolated to the power supply); +5V, the pulse input signal through CP+, DIR+, EN+, is effective under the high level. The method of limiting resistance R is the same as the common anode.
Note: EN can be unconnected,when EN is available, the motor rotor is in a free state (offline state), then you can manually rotate the motor shaft, do your adjustment. After the completion of the manual adjustment, the EN is set to an invalid state, in order to continue the automatic control.
Subversion:

Current:
Size: 96*57*35 (mm)
Package list:
- 1PCS *TB6600 stepper motor driver












