| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $201.77 | $197.65 | $191.48 | $183.24 | Contact US |
 B585 Two-Wheeled Balancing Robot Car (Default Configuration) with GMR Encoder & 4KG Load Capacity
$101.93
B585 Two-Wheeled Balancing Robot Car (Default Configuration) with GMR Encoder & 4KG Load Capacity
$101.93
 B570 Two-Wheeled Balancing Robot Car (Default Configuration) with Hall Encoder & 4KG Load Capacity
$82.40
B570 Two-Wheeled Balancing Robot Car (Default Configuration) with Hall Encoder & 4KG Load Capacity
$82.40
 WHEELTEC B585 DP2 Assembled Two-Wheeled Self-Balancing Robot 3KG Load Capacity (without N10 Lidar)
$146.82
WHEELTEC B585 DP2 Assembled Two-Wheeled Self-Balancing Robot 3KG Load Capacity (without N10 Lidar)
$146.82
WHEELTEC B585 DP2 Assembled Two-Wheeled Self-Balancing Robot 3KG Load Capacity (with N10 25m Lidar)
Description of the Robot:
The second-order balancing robot is a complex system characterized by high order, multiple variables, non-linearity, strong coupling, and inherent instability. This product performs dynamic analysis of the second-order balancing robot based on Lagrangian mechanics, derives the system's state-space representation, and achieves stable control of the robot using LQR control. The product is lightweight, portable, easy to use, and offers excellent cost performance.
Features of the Robot:
WHEELTEC B585 DP2 Second-Order Balancing Robot
* Optional N10 Lidar
* GMR Encoder
* High-power DC Motor
* Battery with Protective Casing
* Supports Parameter Tuning via App
* Supports Attitude Sensing
* Low Voltage Warning Function
* Mathematical Model of Balancing Robot
* LQR Control
* Detailed Documentation Provided
* Modular Design
* Fully Open-source Code
* Technical Support Available
* 3D Model of the Product Provided
High-performance Balancing Robot Chassis
* 3mm thick aluminum alloy with anodized sandblasted surface
* Equipped with high-power reduction motors with AB phase encoders
GMR High-Precision Encoder
* It is a newly upgraded 500-line AB phase GMR high-precision encoder. Its accuracy is more than 38 times that of Hall encoders (most similar products on the market use Hall encoders). The robot equipped with GMR high-precision encoders performs exceptionally well in low-speed navigation.
Compatible with PID Speed and Position Closed-Loop Control Learning
* We provide dedicated source code and detailed tutorial documentation for learning PID control—from speed closed-loop control to position closed-loop control.
Mathematical Modeling Provided
* Mathematical modeling is an important tool in robot development. We provide a handbook of mathematical modeling results for this balancing robot to facilitate in-depth research and learning.
Posture Recognition
* When the robot is placed on the ground, it recognizes this action through algorithms and automatically activates the balancing system. When the robot is picked up vertically while upright, it uses its sensors to recognize this action through algorithms and automatically deactivates the balancing system. Users can master the operation simply by following our video tutorials. All algorithms are fully open-source.
Swing-up Control Based on LQR Algorithm
* This product performs dynamic analysis of the second-order balancing robot based on Lagrangian mechanics, derives the system's state-space representation, and achieves stable control through LQR control.
Stable Swing-Up Control with Disturbance Rejection
* It features strong robustness and can quickly return to stability after external disturbances.
Bluetooth & Wi-Fi App Provided
* For Android and iOS
* Gravity-sensing control and dual-hand button remote control modes
* 5-channel waveform display interface: you can view waveforms at any time without a data cable.
* 9-channel parameter adjustment interface: it allows online tuning and parameter saving during power-off.
* Optimized low battery alert mechanism: APP accurately pushes low-voltage warnings to prevent battery over-discharge.
* Supports Bluetooth 4.0 module
Comprehensive Monitoring of the Balancing Robot via APP
* Battery monitoring feature alerts users via APP when battery level falls below 30%.
* Simulated speed display using left and right encoders
* Real-time graphical display of the robot's tilt angle
* Real-time display of commands received by the robot's lower computer
* Real-time display of commands sent by the APP
Exceptional Remote Control Experience
* Gravity-sensing Control: It uses the phone's motion sensors to send control signals based on real-time orientation. Gravity sensitivity is customizable.
* Joystick Control: A classic control mode. Push the center circle in different directions to send commands. Ideal for one-handed use.
* Dual-hand Button Control: It simulates traditional RC car control using two fingers on the phone screen. The app sends corresponding commands.
Data Display via Waveforms in the App
* Supports up to 5 waveform display channels
* Customizable channel names
* Toggle individual channels on or off
* Axes auto-scale based on input values
* Multiple interpolation algorithms supported, including cubic Bezier
* Option to enable or disable real-time display of each data point
* Pinch-to-zoom gesture supported for waveform detail scaling
Real-Time Multi-Channel Parameter Tuning
* Supports real-time parameter tuning with data updates from the lower computer to the app. Up to 9 adjustable channels
* Power-down parameter saving supported for improved tuning efficiency
* Users can customize each channel's name, value, and adjustment range
PC-like Serial Debug Mode
* Includes a traditional PC-style serial debugging assistant
* Can receive data from and send data to the lower computer
* It operates in a "chat-like" format, allowing for customizable and interactive functions.
One-Click Download via Type-C Cable
* Supports one-click download feature
* Use a type-c data cable for program downloading and serial communication
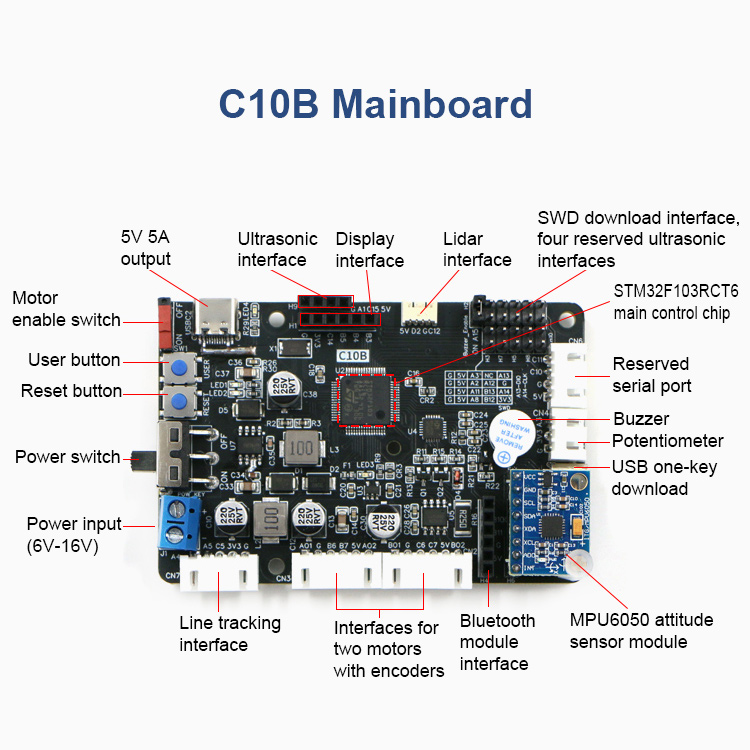
C10B Mainboard:
* It is designed for smart vehicles and ROS development. The mainboard is compatible with a wide range of popular robot chassis types including balancing robots, Ackermann-steering cars, differential drive vehicles, and tracked vehicles. Source code and tutorials are provided.
* The mainboard supports multiple control methods including game controllers, Bluetooth, CAN, and serial communication. It also offers a 5V 5A external power supply interface and a parallel input/output power interface. With the same dimensions and mounting holes as a Raspberry Pi, it can be seamlessly integrated into a ROS-based robot.
* Built-in protections include drive current detection with current limiting, thermistor-based overheat protection, and short-circuit protection for the main control chip.
Robot Specifications:
* Product: Second-Order Balancing Robot
* Model: B585 DP2
* Dimensions: 184mm × 65mm × 541.5mm (including pendulum rod)
* Weight: 1.1kg (including pendulum rod)
* Motor: MG513 Metal Gear Reduction Motor
* Encoder: 500-line AB Phase High-Precision GMR Encoder
* Wheels: 65mm Blue Rubber Tires
* Maximum Load Capacity: 3kg
* Self-balancing Battery Life: 20 hours
* Chassis Bracket: Fully Metal Machined Frame
* Battery: E326S Battery (2550mAh)
* Charger: Lithium Battery Charger with Protection
* OLED Display: Included
* Angular Displacement Sensor: Included
* Simulink Simulation: Supported
* Control Algorithm: LQR
* Tutorial: Comprehensive Development Documentation Provided
Motor Specifications:
* Encoder Type: GMR
* Gear Ratio: 1:30
* Rated Voltage: 12V
* Rated Torque: 1 kg·cm
* Rated Current: 360mA
* Rated Power: 4.32W
* Stall Torque: 10 kg·cm
* Stall Current: 2.8A
Optional N10 Lidar:
A cost-effective TOF laser radar that can be mounted on the B585 DP2 second-order balancing robot, enabling 360° automatic obstacle avoidance while maintaining balance.
Specifications of Optional N10 Lidar:
* Product Name: N10 Laser Lidar
* Measuring Principle: TOF (Time of Flight)
* Scanning Angle: 360°
* Output Data Resolution: 15mm
* Light Source: 905nm Laser
* Data Output: Distance, Angle and Light Intensity
* Measurement / Sampling Frequency: 4500 times/s
* Scanning Frequency: Adjustable 6–12Hz
* Measurement Radius: White objects: up to 25m; black objects: up to 11m
* Interface Type: Serial Port
Product Configuration:
* Balancing robot chassis x1
* High-precision angle sensor x1
* Pendulum rod x1
* 12V 2550mAh safety battery E326S x1
* Lithium battery charger with protection x1
* C10B mainboard x1
* OLED display x1
* N10 lidar x1
* Large cross screwdriver x1
* Small flat-blade screwdriver x1
* Data download cable x1
Packing List:
* 1 x Self-balancing robot assembled (with N10 lidar)
* 1 x Large cross screwdriver
* 1 x Small flat-blade screwdriver
* 1 x Data download cable
Packaging Details:
* Weight: 1.3kg
Note:
* The robot is pre-assembled and fully tested. It is ready to use.
* Wifi module is optional.



")

")
 with Hall Encoder & 4KG Load Capacity")
 with GMR Encoder & 4KG Load Capacity")




