| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $128.67 | $126.05 | $122.11 | $116.86 | Contact US |
 IP870 Standard Second-Order Linear Inverted Pendulum with Desk Clamp Supports First-Order Function
$531.14
IP870 Standard Second-Order Linear Inverted Pendulum with Desk Clamp Supports First-Order Function
$531.14
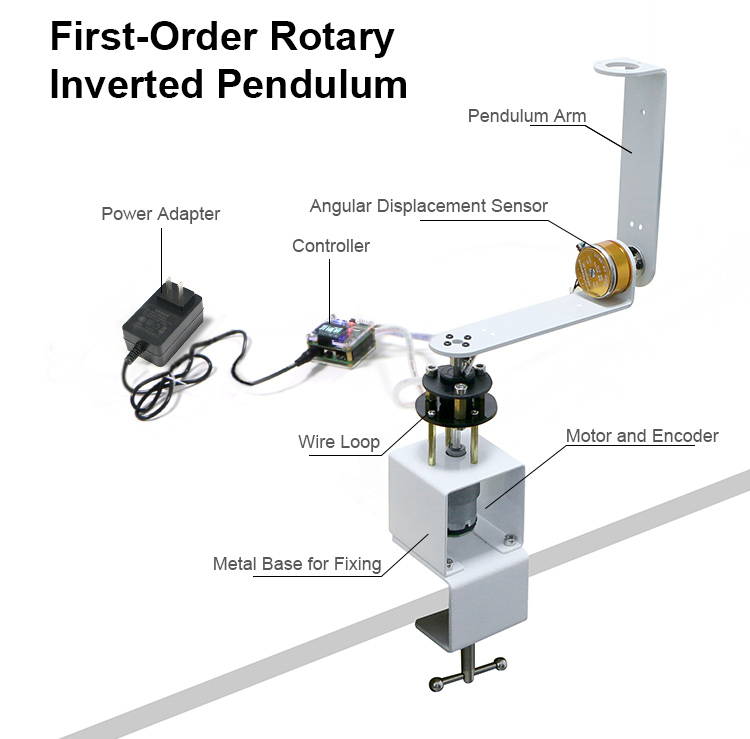
 WHEELTEC IP570 First-Order Rotary Inverted Pendulum for Ar-duino (w/ Long Shaft Motor and Wire Loop)
$137.30
WHEELTEC IP570 First-Order Rotary Inverted Pendulum for Ar-duino (w/ Long Shaft Motor and Wire Loop)
$137.30
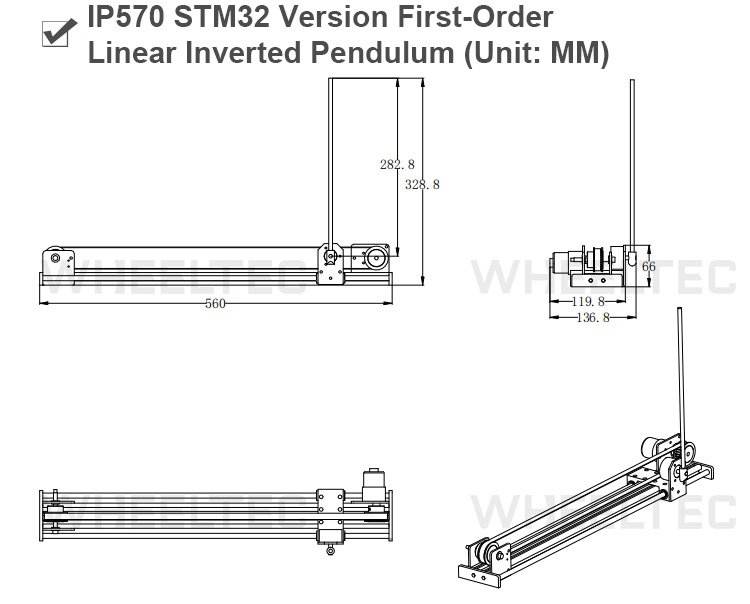
 WHEELTEC IP570 First-Order Linear Inverted Pendulum for Ar-duino (w/ Short Shaft Motor Hall Encoder)
$177.30
WHEELTEC IP570 First-Order Linear Inverted Pendulum for Ar-duino (w/ Short Shaft Motor Hall Encoder)
$177.30
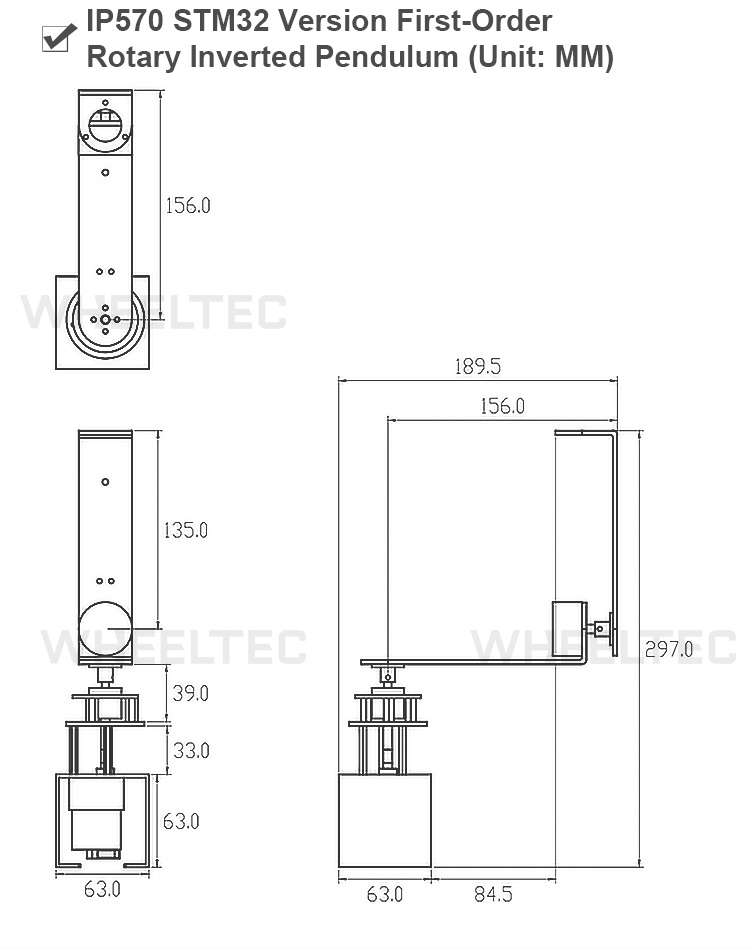
WHEELTEC IP570 STM32 Version First-Order Rotary Inverted Pendulum (Long Shaft MG513 Button Control)
Product Introduction:
The inverted pendulum system is a typical multi-variable, nonlinear, strongly coupled, and naturally unstable system. Research on the inverted pendulum effectively reflects many classic control challenges, such as non-linearity and robustness.
This product conducts dynamic analysis of the inverted pendulum and uses basic PID/LQR control algorithms to achieve stable control of both first-order and second-order inverted pendulums. With hardware optimization, the product offers an exceptionally high cost-performance ratio.
Features:
WHEELTEC IP570 Inverted Pendulum
* Supports PID/LQR control
* Fully open-source code
* Excellent cost-performance ratio
Supports Button Control
* The first-order rotary inverted pendulum can be controlled to rotate clockwise and counterclockwise.
Advantages
* LQR Control
* Lagrangian Mechanics
* State Space Representation
* Provides Principle Tutorials
* Precision Planetary Gear Motor
* High-Precision CNC Machining
* Modular Design
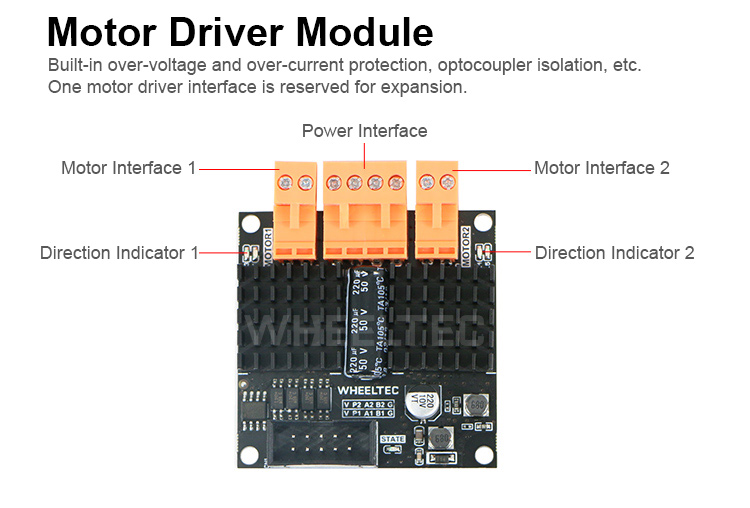
* Stall Protection
* Reverse Polarity Protection
* Over-current Protection
* Stable Power Supply Power Adapter
* Resistant to External Interference
* High-Precision Angular Displacement Sensor
* Provides Upper Computer Software
* Provides Detailed Documentation
* Fully Open-Source Code
* Free Updates for Documentation
Fully Open Source Code with Support for Secondary Development
* The inverted pendulum is an under-actuated control product with complex overall hardware and software. We have invested a significant amount of research and development effort into this product, and its code is fully open source. Users can quickly perform secondary development for under-actuated or intelligent control projects based on this product.
Provides Classic PID Algorithm and Model-Based LQR Algorithm
* This product provides two different algorithms for stabilizing the inverted pendulum: the classic PID algorithm and the model-based LQR algorithm. Detailed tutorial documentation is included. Users can learn the related inverted pendulum control knowledge step by step.
Exceptional Cost-Performance Ratio
* Inverted pendulum experimental platforms on the market generally cost tens of thousands of RMB. We have developed a high cost-performance ratio inverted pendulum product through powerful software and hardware integration, reducing both costs and the space occupied by the product, and making it affordable for most researchers.
Stabilizing Control with Resistance to External Interference
* It has excellent robustness and can quickly recover stability after external interference.
Built-in Pose Protection
* When the pendulum rod exceeds a certain tilt angle, the system automatically shuts down the motor to prevent safety issues caused by forced control.
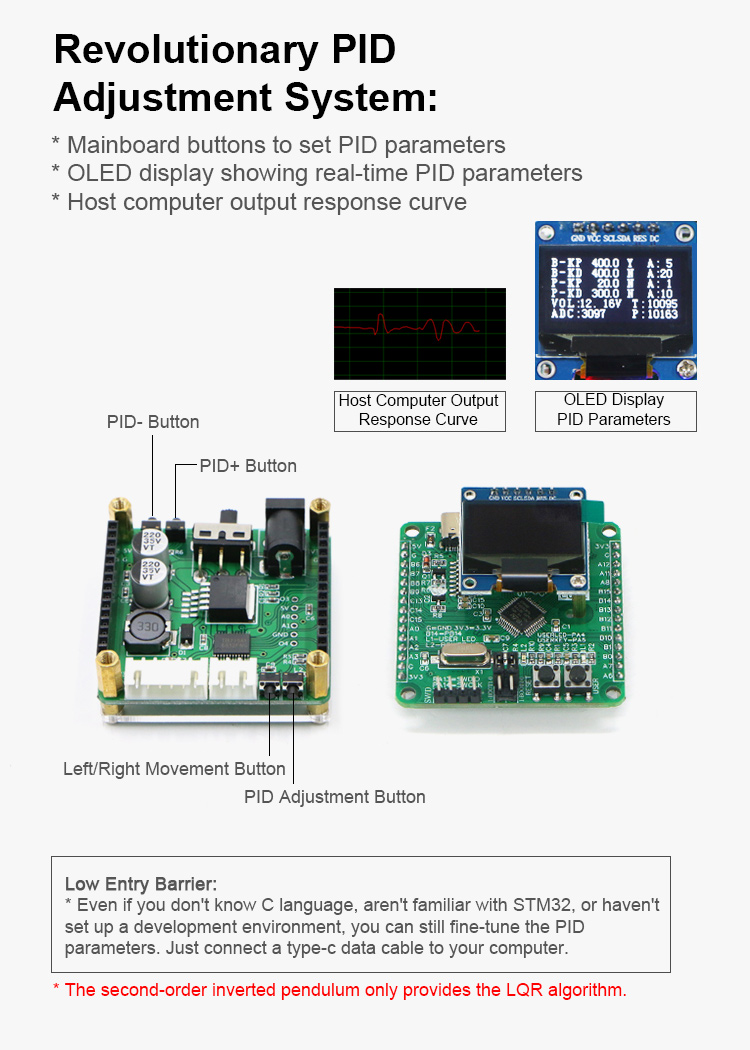
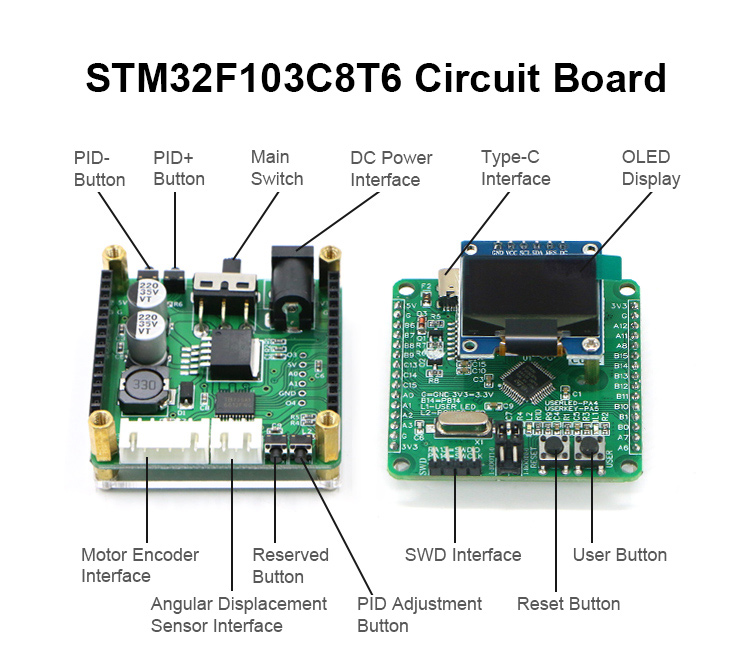
Revolutionary PID Adjustment System
* Mainboard buttons to set PID parameters
* OLED display showing real-time PID parameters
* Host computer output response curve
Comprehensive Hardware and Software Overview:
* Simulink Simulation Source Code Provided: Simulates the impact of different parameters on control system performance
* Windows-Based Host Computer Software Provided: Enables real-time monitoring of the inverted pendulum system
* Diverse Program Project Files: Offers both standard library and HAL library source codes to accommodate different development preferences
Product Application Areas:
* Learning Platform for Under-actuated Control
* Teaching Tool for Automatic Control Laboratories
* Development Platform for Intelligent Control Algorithms
MG513 Motor:
* Long shaft version of MG513 motor with AB phase encoder
* Built-in pull-up shaping; microcontrollers such as STM32, 51, and Ar-duino can directly read the signals
MG513 Motor Specifications:
* Encoder type: Hall encoder
* Rated voltage: 12V
* Motor type: Permanent magnet brushed motor
* Rated current: 2.8A
* Rated torque: 0.66kgf·cm
* Gear ratio: 1:20
* Encoder resolution: 260 pulses (measured at the reducer output shaft)
* Rated power: 4.32W
* Stall current: 2.8A
* Speed before reduction: 11,000 rpm
* Speed after reduction: 549 ±15 rpm
* Output shaft: Diameter 6mm, D-shaped eccentric shaft
High-Power Power Adapter:
* Built-in protections: short circuit and over-current protection
* Name: 12V 3A Adapter with 3C Certification
* Output Parameters: 12V 3A
* Output Plug: 2-pin power plug
* Input Parameters: 100–240V~ 50Hz/60Hz 1.5A
* Output Interface: DC5.5*2.1 (compatible with DC5.5*2.5)
Configuration of First-Order Rotary Inverted Pendulum STM32 Version:
* Inverted Pendulum Special Motor ×1
* Metal Desktop Fixed Bracket ×1
* Wire Loop ×1
* Metal Pendulum Rod ×1
* Metal Cantilever ×1
* Metal Flange Coupling ×2
* Allen Wrench ×1
* Copper Columns (Several)
* Winding Tubes (Several)
* Screws and Nuts (Several)
* Reverse Polarity Protection Ribbon Cables and Connectors (Several)
* Angular Displacement Sensor ×1
* Metal U-shaped Motor Bracket ×1
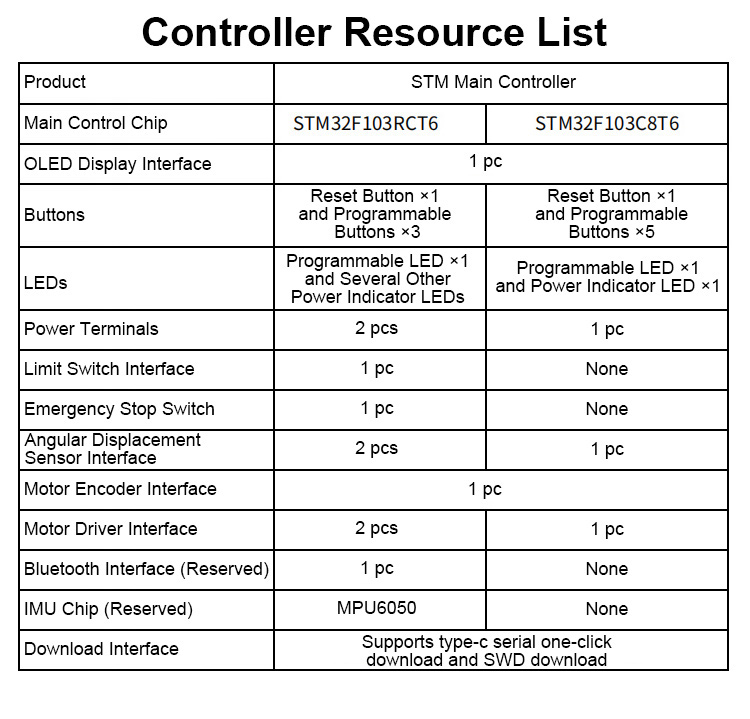
* STM32 Controller ×1
* 12V 3A Adapter ×1
* Program Download Cable ×1
* OLED Display ×1
Packing List:
* 1 x Set of Inverted Pendulum
Packaging Details:
* Weight: 2kg
Note:
* It has been assembled and is ready to use.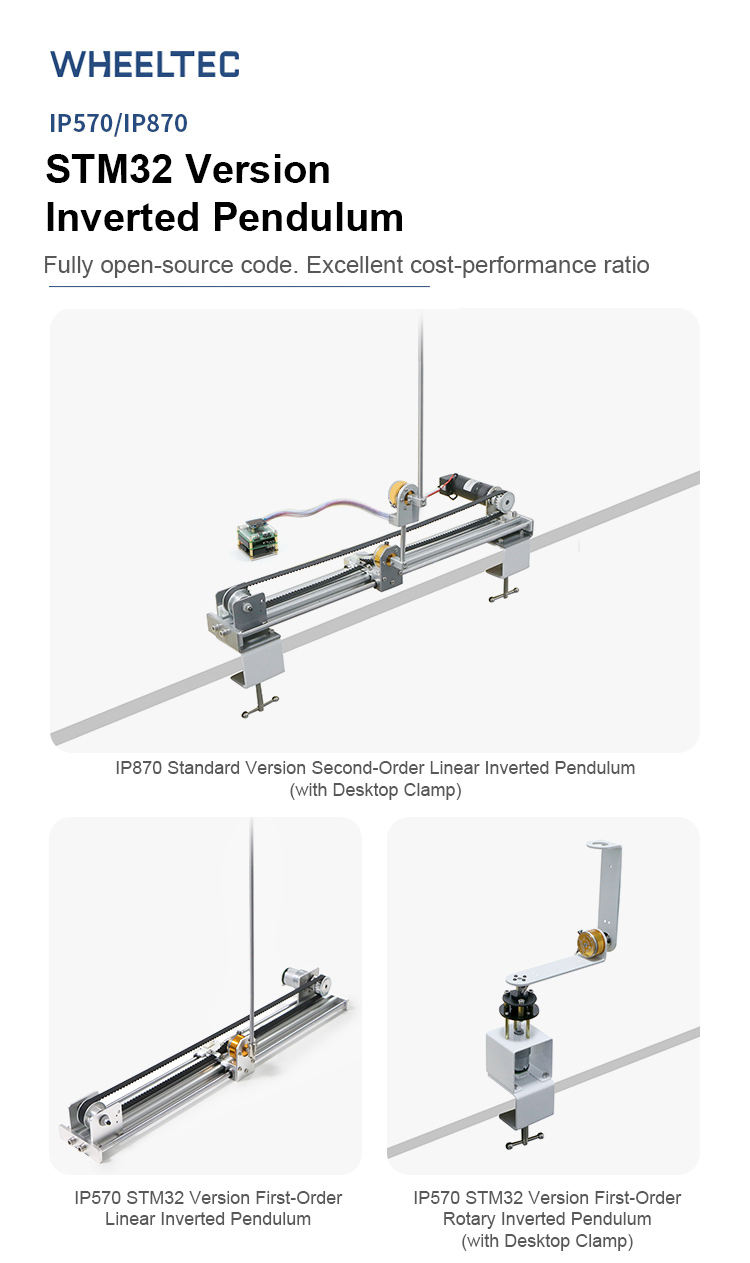

")

")

")




