| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $442.38 | $433.35 | $419.81 | $401.75 | Contact US |
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$270.09
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module with Debugger
$270.09
 ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
ROBSTRIDE04 Collimated Drive Lightweight 120Nm Integrated High Performance Joint Motor Module
$262.32
 ROBSTRIDE01 Collimated Drive Lightweight 17Nm Integrated High Performance Joint Motor Module with Debugger
$135.68
ROBSTRIDE01 Collimated Drive Lightweight 17Nm Integrated High Performance Joint Motor Module with Debugger
$135.68
WHEELTEC R550 LBC Assembled Robot Car ROS Car w/ Mecanum Wheels for Education Research Competition
R550 LBC ROS Car with Mecanum Wheels:
R550 LBC is a product based on LubanCat 1S for ROS education entry scenarios. A balance of minimalist appearance and ease of development is achieved through a mature industrial design. Using the LubanCat 1S development board based on RK3566 chip, the car can be used for ARM development and ROS introductory learning, and supports the long-term support version of ROS2 humble system based on Ubuntu 22.04.
Chassis, STM32 main control board, battery, charger, LubanCat 1S board, lidar and RGB camera are included. It is designed with a ready-to-use ROS system.
Features:
Simple and easy-to-use industrial design
Scientific research robots need to meet the requirements of beautiful appearance and ease of use. The bottom of the car uses a closed sheet metal design, which better protects the battery (with relatively low development frequency and relatively large power), motor, etc., and eliminates potential safety hazards. The upper part uses a streamlined bracket for secondary development and ROS expansion, which makes it easy to debug and plug.
Chassis with mecanum wheels
The whole chassis is fully metal-machined. Mecanum wheels are made of metal, and their accuracy and life are better than those of plastic mecanum wheels. The chassis is also equipped with a high-precision suspension system to adapt to uneven ground. The robot car also adopts a tight-fitting coupling, so you no longer have to worry about the wheels coming off.
GMR high-precision encoder
- The newly upgraded 500-wire AB-phase GMR high-precision encoder has more than 38 times the accuracy of Hall encoder (used by similar products on the market). Equipped with GMR high-precision encoder, the performance of the car is excellent when navigating at low speeds.
- Equipped with four high-power motors, the movement effect and load capacity of the car chassis are outstanding.
- Encoder type: GMR (Giant Magneto Resistance)
- Rated torque: 1kg.cm
- Stall torque: 10kg.cm
- Reduction ratio: 1:30
- Rated current: 360mA
- Stall current: 2.8A
- Rated voltage: 12V
- Rated power: 4.32W
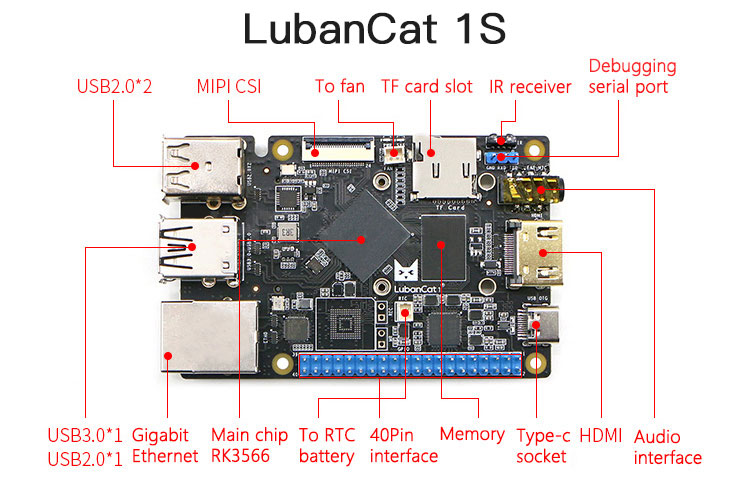
LubanCat 1S development board
- It is a ROS development board with RK3566 chip and its performance is comparable to that for Raspberry Pi
- Item name: LubanCat 1S 2GB
- Power socket: 5V at 3A DC input, Type-C interface
- Main chip: RK3566 (quad-core for Cortex-A55, 1.8GHz, Mali-G52)
- RAM: 2GB LPDDR4X
- Storage: for 32G memory card
- Ethernet: 10/100/1000M adaptive Ethernet port*1
- HDMI: HDMI2.0 display interface
- USB2.0: Type-A interface*3 (HOST); Type-C interface*1 (OTG), which is a firmware flashing interface and is shared with the power interface
- USB 3.0: Type-A interface*1 (HOST)
- Mini-PCle: Can be used with full-height or half-height WIFI network cards, 4G modules, or other Mini-PCle interface modules
- SIM card holder: SIM card function needs to be used with a 4G module
- 40Pin interface: compatible with 40Pin interface for Raspberry Pi and support PWM, GPIO, I²C, SPI and UART functions
- Audio interface: headphone out + microphone input interface
- Infrared receiving head: Support infrared remote control
- RTC battery interface: Support RTC function
Upgraded TOF lidar
- The N10P is a commercial-grade TOF lidar. Compared with triangular ranging radars, this TOF radar has been greatly improved in terms of overall performance
- Product name: N10P Lidar
- Measuring radius: 25m/82ft
- Scanning frequency: 6~12Hz adjustable
- Sampling frequency: 5400Hz
- Output: angle, distance and luminous intensity
- Angular resolution: 0.4°~0.8° adjustable
- Drive motor type: brushless motor
- 360° scanning ranging: √
- Interface type: serial port
- Radar principle: TOF
Key Functions (Fully Open Source):
- Classic 2D lidar mapping, navigation and obstacle avoidance. Support for Gmapping, hector, karto, cartographer mapping, and support fixed-point navigation, multi-point navigation and obstacle avoidance in navigation.
- ROS QT function of graphical interface. Deploy the QT graphical interface to realize one-click ROS function. It provides visual feedback on the speed and electric quantity of the car.
- Web camera surveillance: The robot camera image can be directly viewed through any browser on a PC, and remote monitoring can be quickly deployed.
- RGB camera line following: By following the ground line with the RGB camera and the lidar, automatic obstacle avoidance can be realized during line patrol.
- Lidar follower: The robot scans nearby obstacles through lidar and selects the nearest object to follow.
- LiDAR angle shielding: Through SDK optimization, angle shielding can be achieved for all lidars.
- TEB and DWA path planning: Provide extremely detailed video tutorials. Through Python mini games, you will learn navigation path planning from scratch.
- Robot chassis kinematics analysis: We provide kinematic analysis of robot chassis of manufacturers in the market, including Ackerman, differential, crawler, mecanum wheel, omni wheel, and 4WD vehicles.
- Control board protection circuit: The electrical wiring of the industrial-grade four-layer board is more compliant. Real-time temperature control monitoring protection is realized by thermistor. Current sampling realizes over-current protection for hardware detection of motor stalls.
- Provide ROS APP for mapping and navigation: Control the ROS side through the APP. This can realize the control, mapping, navigation and other functions of the car movement.
- The bottom end provides a powerful parameter control APP. For Android and IOS. Support APP parameter adjustment, gravity sensor control, and waveform display.
Core Function List:
A. Robot underlying functions
(01) Underlying ROS serial communication
(02) Reserved CAN communication interface
(03) IMU and mileage data feedback
(04) Battery voltage detection and voltage alarm
(05) Download with one click through the serial port
(06) Gyroscope zero drift clearance
(07) Robot chassis kinematics analysis
(08) Use model aircraft remote control
(09) Common circuit protection function
B. Mapping and navigation related functions
(10) Robot dynamic obstacle avoidance
(11) Robot fixed-point navigation
(12) Robot multi-point navigation
(13) TEB and DWA path planning
(14) LiDAR angle shielding
(15) LiDAR mapping and navigation
(16) For Gmapping mapping
(17) For Hector drawing
(18) For Karto drawings
(19) For Cartographer mapping
(20) RRT self-mapping
(21) Robot formation (Navigator algorithm)
(22) Robot formation switching
(23) Robot formation to avoid obstacles
C. Human-computer interaction related functions
(24) Keyboard node control
(25) APP gravity sensor control
(26) Adjust PID parameters via APP
(27) ROS APP image transmission and control
(28) ROS APP mapping
(29) ROS APP navigation
(30) Lidar following
(31) ROS Qt function
D. Visual processing related functions
(32) Applications and tutorials
(33) Web camera surveillance
(34) RGB visual line patrol (with radar obstacle avoidance)
Application Areas:
- It can be applied to maker education, lab research, and computer competitions.
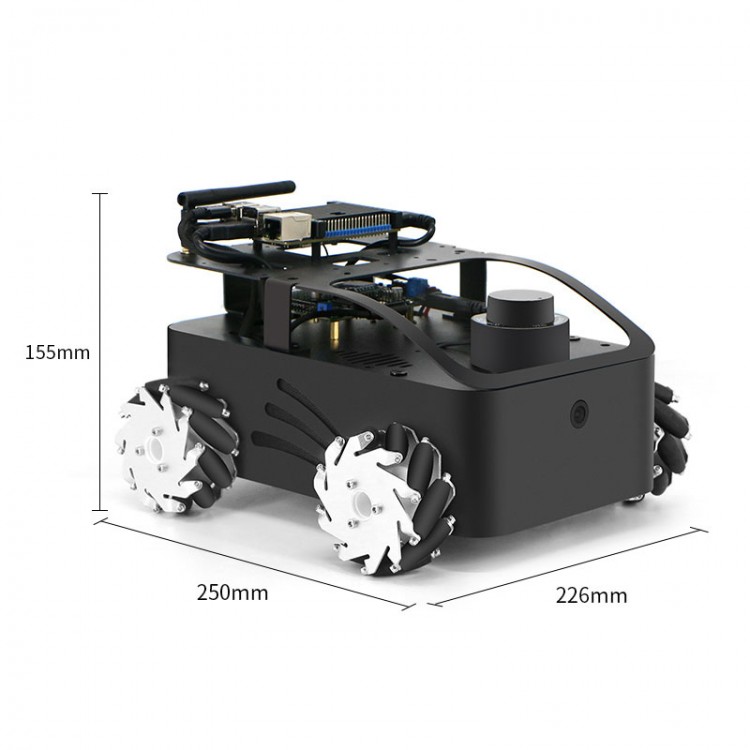
Product Specifications:
- Product name: R550 LBC Mecanum Wheel Version
- ROS main control: LubanCat 1S 2GB
- Drive structure: 4WD mecanum wheel structure with suspension system
- Wheels: 75mm/3" aluminum alloy mecanum wheels
- Car size: 250 x 226 x 155mm/9.8 x 8.9 x 6.1"
- Car weight: 4.1kg/9lb
- Load capacity: 4kg/8.8lb
- Maximum speed: 1m/s
- Motor: MG513 metal gear reduction motor
- Encoder: 500-line AB-phase high-precision GMR encoder
- Endurance time (speed 0.45m/s): 4.5 hours (light load). 3 hours (with 1kg/2.2lb load)
- Control mode: APP, wireless controller for PS2, CAN, serial port, etc.
- STM32 main control: STM32F407VET6
- Lidar: N10P
- Camera: C70 large FOV RGB camera
- Operating system: ROS uses ROS1 melodic; STM32 uses FreeRTOS
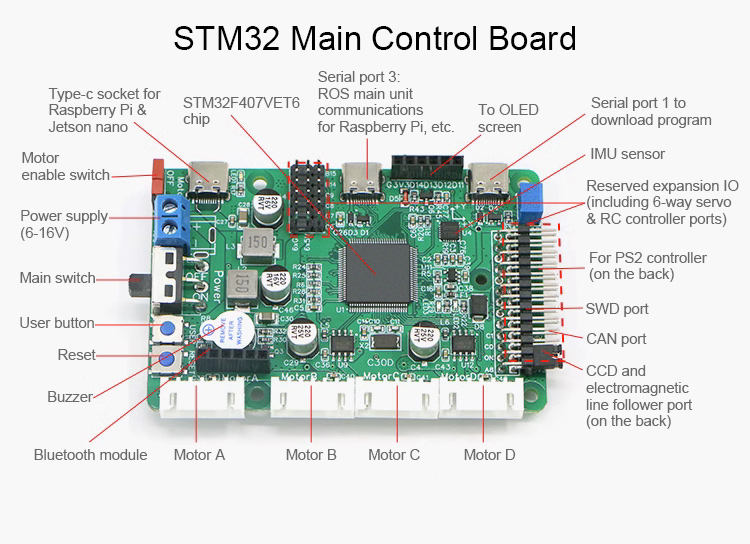
STM32 Main Control Board:
- The board can communicate with the outside world through serial port or CAN. It provides a 5V 5A interface to power boards such as for Raspberry Pi and Jetson nano. The code and schematics are fully open source
- Main control chip: 100-pin STM32F407, with good expansion performance
- Model airplane remote control interface: support
- Download interface: one click to download via serial port or support SWD interface to download
- Supply power to the outside: dual-way 5V 5A
- Expansion interface: CAN, CCD, electromagnetic line follower, etc.
- GP10 reserved: dozens
- Reserved servo interface: 6-way servo interface (external 6DOF mechanical arm can be connected)
- Reserved serial port: lead out 4 serial ports
- Protection circuit: Over-temperature, short-circuit and over-current protection
- Number of board layers: Industrial grade 4-layer board
Battery Parameters:
- Multiple protection: over-discharge, overcharge, short-circuit and over-voltage protection
- Capacity: 12V 6000mAh
- Plug: T-type discharge plug
- Dimensions: 98 x 63 x 21.5mm/3.9 x 2.5 x 0.8"
- Weight: 0.26kg/0.6lb
C70 FOV RGB Camera:
- It has a large field of view and a wide-angle lens. Thus, it can be used in different environments
- Resolution: 720P
- FOV: H64.5°xV50°
- Sensor type: COMS
- Frame rate: 25fps
- Dimensions: 32 x 32 x 26.8mm/1.3 x 1.3 x 1.1"
- Weight: 53g/0.1lb
- Supported systems: For XP, VISTA, WIN7, WIN8, WIN10 and Ubuntu
Packing List:
Mecanum Wheel Chassis Parts:
- 4 x 12V30F MG513 motors with GMR encoder
- 4 x 75mm/3" mecanum wheels
- 4 x 37 motor mounts
- 4 x Metal couplings
- 1 x Set of car shell and bracket
- 1 x Set of suspension mechanism
- 1 x Set of accessories (screws, nuts, poles and wires)
Electronic Control Parts:
- 1 x C30D (4WD) main control
- 1 x Bluetooth module
- 1 x OLED display
- 1 x 6000mah 12V lithium battery
- 1 x Lithium battery charger with protection
- 1 x Data download cable
ROS Parts:
- 1 x LubanCat 1S 2GB
- 1 x Heat sink for LubanCat 1S
- 1 x N10P lidar
- 1 x C70 FOV RGB camera
- 1 x 64G high-speed memory card & card reader
Note:
- The robot car has been assembled and debugged before delivery. It is ready to use.
- 3D models of the product is provided.
- Other items pictured are not included, for demonstration purposes only. Thank you for your understanding!






")



