| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $2,391.33 | $2,342.52 | $2,269.32 | $2,171.72 | Contact US |
 M5Stack StamPLC IoT Programmable Logic Controller ESP32S3 Cloud Data Monitoring for Industrial Automation
$66.20
M5Stack StamPLC IoT Programmable Logic Controller ESP32S3 Cloud Data Monitoring for Industrial Automation
$66.20
 Coolmay MX3G-70C-48MT 7" HMI PLC All in One HMI with Built-in PLC (24DI 24DO Transistor Output)
$155.14
Coolmay MX3G-70C-48MT 7" HMI PLC All in One HMI with Built-in PLC (24DI 24DO Transistor Output)
$155.14
 Coolmay MX3G-43C-22MT 4.3" HMI PLC All in One HMI with Built-in PLC (12DI 10DO Transistor Output)
$95.71
Coolmay MX3G-43C-22MT 4.3" HMI PLC All in One HMI with Built-in PLC (12DI 10DO Transistor Output)
$95.71
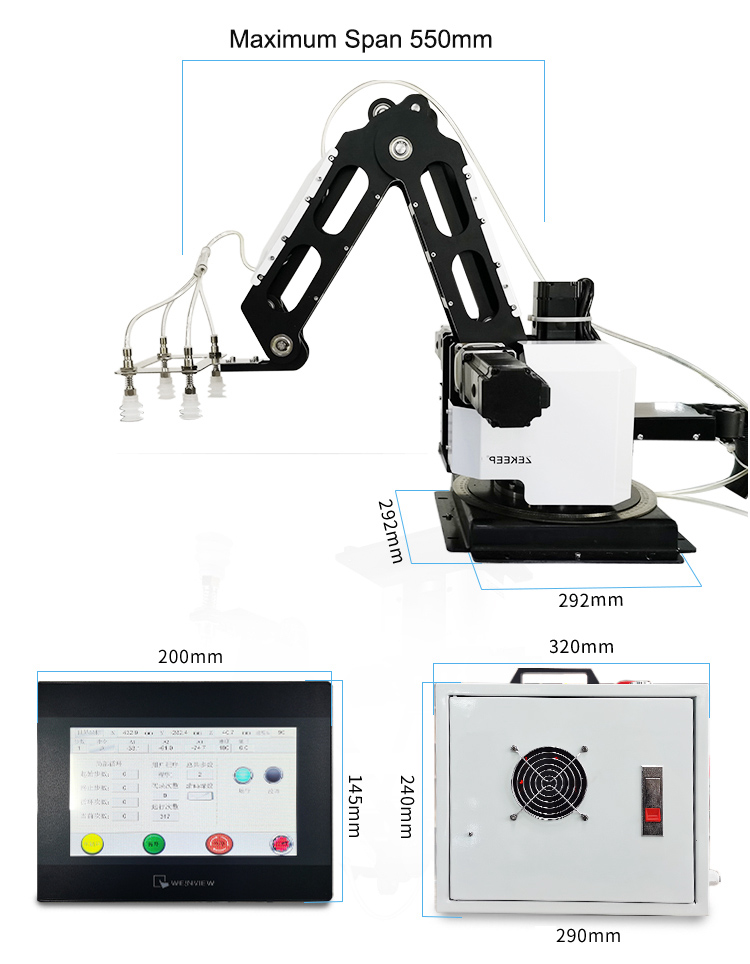
ZEKEEP 3-Axis Small Industrial Robot Arm Mechanical Arm 2KG Palletizing Handling Loading Unloading
Advantages:
- Intelligent handling
- Multiple destacking and palletizing methods
- Two teaching methods
- Accurate
- Open movement agreement
- Support secondary development to meet various control linkages in the industry
Functions:
Palletizing, Depalletizing, Handling, Loading and Unloading Functions
8 palletizing tray numbers can be used, and the robot can move from 1 tray to 8 trays at a time, and then the number of palletizing transfers can be set in the cycle setting. 6 kinds of palletizing cargo arrangement methods (cargo placement direction). The palletizing sequence can be selected. In the palletizing interface, the speed is adjustable, the position coordinates are displayed, the number of palletizing and handling times and the number of working cycles are recorded, etc.
Two Teaching Methods for Easy Operation of the Robot
1. Support jog teaching. This robot refers to the programming habits and interface design of large-scale industrial manipulators. In industrial use, in order to improve stability and avoid data transmission interference loss and delay problems, it is not recommended to use APP wireless control or computer software and other control methods.
2. Support drag teaching. Drag the manipulator arm to move by hand, record the trajectory. The trajectory and position can also be fine-tuned through the touch panel, and the configuration of input and output IO can complete complex programming. It is convenient for customers who do not have a programming foundation.
Flat Square Drawing
Movable square trajectory and drawing square
Multi-Segment Arc Drawing
Movable arc trajectory and drawing arc
IO Input and Output Control and Multi-Machine Connection to Cooperate with Production Line
Input and output IO 6pcs each. Support external signal IO input to trigger control of the robot, or robot IO output signal to trigger control of external equipment
8 Work instruction Operations and Precise Coordinates, Speed Settings, etc.
The instruction set selection box will turn gray when selected. Point instruction is to go point. The joint offset is the offset relative to the current coordinate. The arc is to draw a circle. Straight line and straight line offset are both straight lines (the former is an absolute position, the latter is a relative position). DI/DO are IO input and output ports (each has eight ports). The palletizing function is handling. Real-time display of coordinate position and speed status of each step
Equipment Alarm Log
All alarm items of the last seven days are recorded in the alarm log, including time and date
User Program Settings
Can save 3 groups of user fixed programs, which is convenient for use in multiple working modes. With power-off storage function
Equipment Daily Inspection Test Procedures
Three kinds of test procedures before leaving the factory. After purchasing, it can also be tested by writing the factory program. Joints are every joint action. Square is to draw a square. Palletizing is to perform four palletizing and handling actions
Features:
- The structural design and materials are very rigorous. The robot body, motor, reducer, bearing and various parts are all custom-designed. The base structure design has been patented
- Adopt joint coordinates, world coordinates. The position accuracy can be set, and the position can be adjusted by touching the demonstrator. Repeat accuracy 0.3mm/0.01"
- Anti-lost step function. If there is an external force collision, it will automatically return to its position to ensure the accuracy of the working movement position
- With brake function. Keep the original state after power off. Don't crash the machine during power outage or power failure
- Multiple alarm prompts and settings to ensure equipment stability and safety. Single-step speed is zero error alarm. Motor failure alarm, motor communication failure alarm, joint offset error alarm, minimum loop speed error alarm, deceleration position error alarm, loop body out of range alarm, emergency stop alarm, etc. There is an indicator light on the top of the control box. The display prompts the cause of the alarm
Basic Parameters:
- Number of axes: 3 axes
- Working voltage: 220V 50HZ
- Power input: 24V/14.6A
- Working temperature: -10℃ to 60℃
- Material: body: aluminum alloy; base: heavier sheet metal; control box: sheet metal
- Machine weight (including body and control box set): 30KG/66LB
- Output power: more than 150W
Load Parameters:
- Maximum load: 2KG/4.4LB
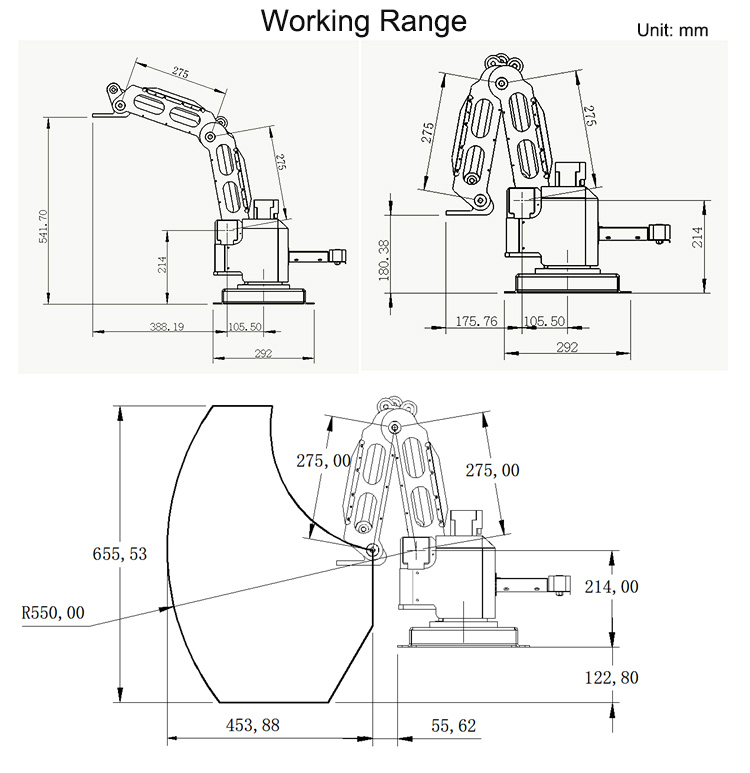
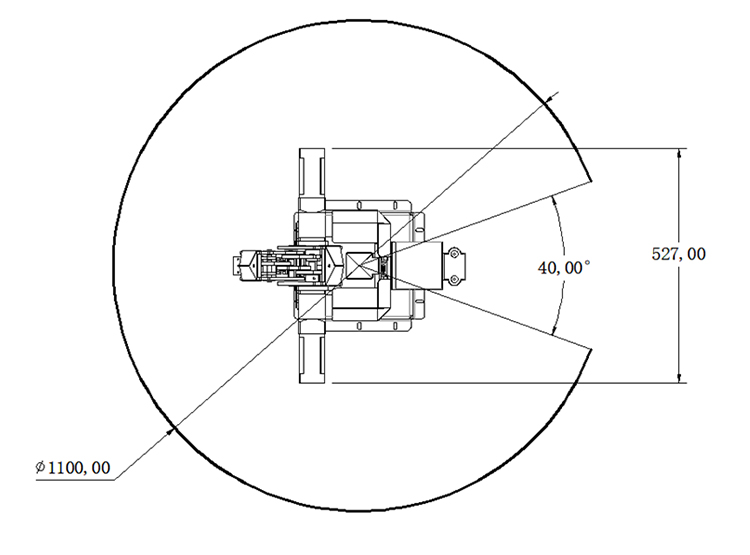
Working Range:
- Base rotating working range (X axis): -162° to 162° (36° reserved for dead zone)
- Boom working range (Y axis): -100° to 0°
- Working range of forearm (Z axis): -118° to 0°
- Maximum span: 550mm/21.7"
Movement Speed Parameters:
- Maximum speed of single arm joint: 300°/s
Precision Parameters:
- Repeat positioning accuracy: 0.3mm/0.01"
Motor Parameters:
- Type: 57 closed loop stepper motor (with encoder, brake)
- Step angle: 1.8°
- Holding torque: 2.2N/m
- Rated current: 5A
Reducer Parameters:
- Type: High-precision helical gear (not ordinary straight gear)
- Backlash: less than 3 arc minutes
Function Parameter:
- Linear interpolation, circular interpolation, acceleration and deceleration algorithm, input & output IO
Control Parameters:
- Jog teaching programming: the programming method is similar to that of large industrial robots
- Drag teaching programming: drag by hand, the demonstrator records the position and fine adjustment of the position
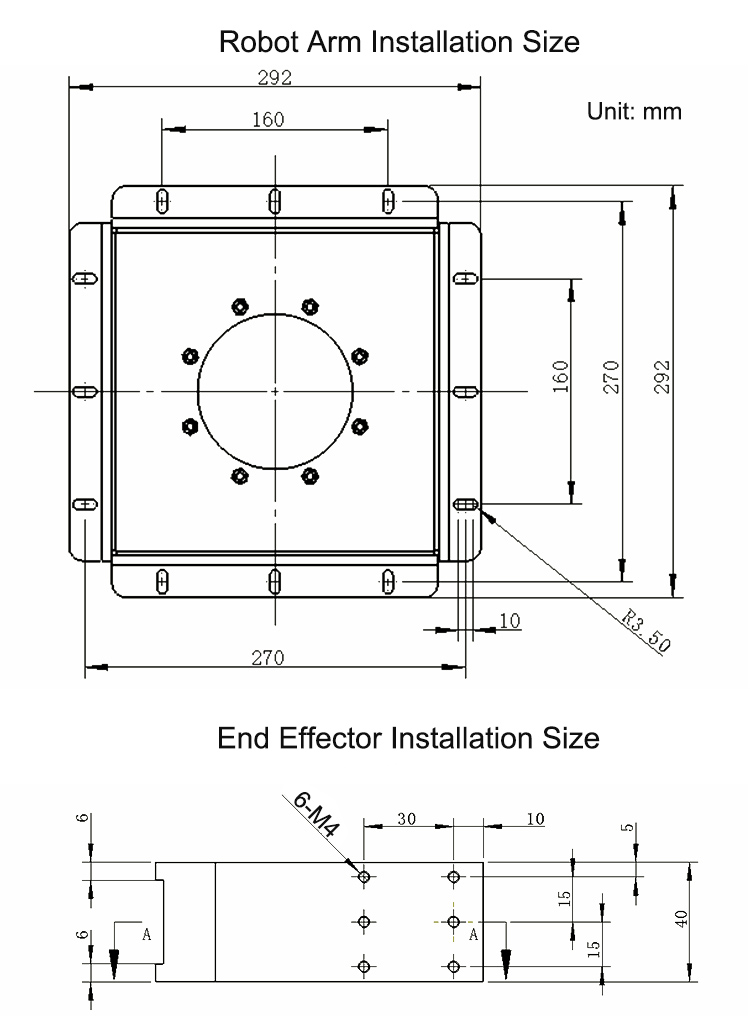
End Effector Parameters:
- Without end effector. Keep the end level. Fixtures, suction cups, pneumatic claws, etc. can be customized according to production needs
Package Included:
- 1 x Robot Body
- 1 x Control Box
- 1 x Touch Screen Demonstrator
- 1 x Robot Body-Control Box Connection Cable 2M/6.6FT
- 1 x User Manual (electronic version)
Note:
- End effector parts pictured are not included in the package, for demonstration purposes only. Thank you for your understanding!
FAQ:
1. Can it be used in industry? Is it different from industrial robots?
This robot can be used in industry to meet the requirements of palletizing, handling, loading and unloading with a load of 2KG/4.4LB, and is designed with reference to the habits and ideas of large industrial robots.
2. Can it be used for teaching and training of industrial robots?
The programming function is less than that of large industrial robots, and only from programming and learning the use of robots can be used as introductory teaching training. Drawing lessons from the use habits, programming habits, and programming ideas of large industrial robots, it can be used for palletizing, handling, and loading and unloading programming teaching.
3. Can a green hand operate a robotic arm?
Yes. For novices, this robot not only has the conventional inching teaching programming of industrial robots, but also supports drag teaching programming, which is easy to operate. For details, please refer to the manual after purchase.
4. Can the robot be open sourced?
Not completely open source. The bottom layer provides a robotic arm control communication protocol, supports secondary development of peripherals and additional functions, interacts with external devices, and is online.
Open Motion Control Protocol:
- Robotic arm zero calibration protocol instruction
- Robotic arm stop protocol command
- Robotic arm control base protocol instruction
- Robotic arm control big arm motor protocol command
- Manipulator control arm motor protocol command
- Air pump switch protocol instruction
- Claw switch protocol instruction
- Get the current world coordinate (robotic arm) protocol command
- Get the current angle (robotic arm) protocol command
- Get the current number of entered steps (robotic arm) protocol command
- Cleaner protocol command
- Control walk point protocol command
- Control walk straight agreement instruction
- Control arc protocol command
- Control DI, DO protocol instructions
- Control gripper protocol command
- Control air pump protocol command
- Provide mechanical control serial port communication protocol