| Quantity | 3+ units | 10+ units | 30+ units | 50+ units | More |
|---|---|---|---|---|---|
| Price /Unit | $2,836.20 | $2,778.32 | $2,691.49 | $2,575.73 | Contact US |
 XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-200KG)
$168.45
XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-200KG)
$168.45
 XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-100KG)
$168.45
XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-100KG)
$168.45
 XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-50KG)
$157.09
XSB9 Handheld Force Gauge Digital Force Gauge + DYMH-103 Miniature Load Cell Sensor (0-50KG)
$157.09
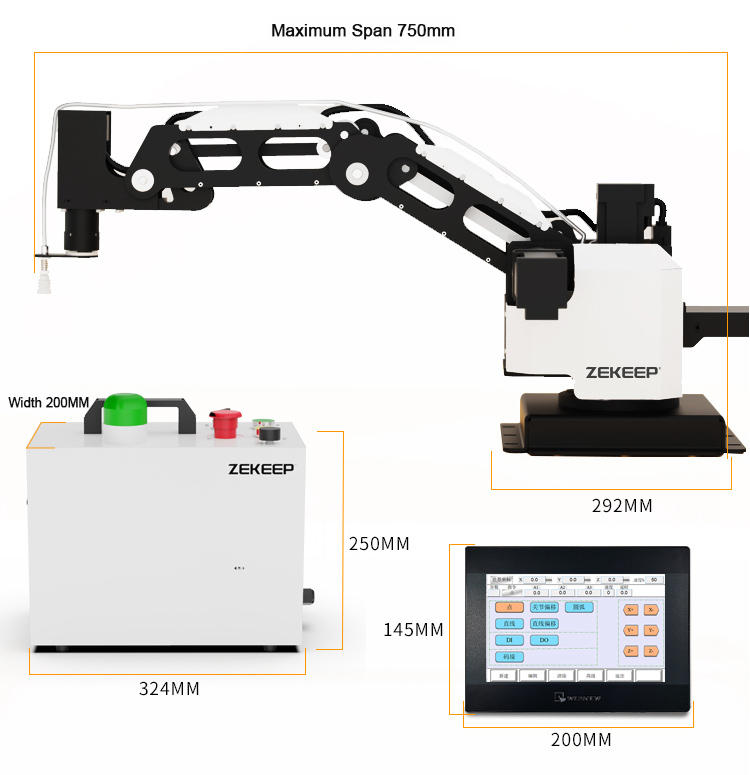
ZEKEEP 4-Axis Industrial Robot Arm Desktop Mechanical Arm 2KG Palletizing Handling Loading Unloading
Advantages:
- Open control protocol, support secondary development
- With permanent magnet brake, the machine will not be damaged when power-off
- Two teaching modes. Touch screen programming and teaching, drag learning and teaching
- Support intelligent palletizing and handling
- Support automatic identification of object handling expansion
- Support for OPENMV, USB and other cameras to develop visual scenes
- Supports combined movement of square and arc trajectories
- Maximum load 2KG/4.4LB for industrial applications
- Motor with closed-loop encoder does not lose steps and with high precision
- Simple operation and easy to use
Description:
It is a 57 stepper motor 4-axis industrial robot arm. Open robotic arm control protocol (serial port protocol) is easy to use for secondary development of user equipment. It can be used for palletizing, unstacking and handling. It can support point-to-point, point to straight line, straight line to straight line, etc., walk arc, DO output, DI input. It includes world coordinates, that is, it can go straight up and down.
The control protocol can also support the development of visual scenes for OPENMV, USB and other cameras, visual interaction, identification of object size and object location and handling (self-developed host computer is required), as well as connection of external equipment, which can be used for small industrial production.
This robot arm is also equipped with a demonstrator, which is easy to operate. It supports manual teaching and drag teaching. Supports three user formulas and 50-step programmable numbers, and the maximum load of the robotic arm can reach 2KG/4.4LB.
Features:
- Handling function: Support air pump to suck objects. The robotic arm can easily absorb items within 2KG/4.4LB
- Square and arc motion: movable arc trajectory and drawing arc
- Two teaching methods, convenient to operate the robot. 1. Support jog teaching. This robot refers to the programming habits and interface design of large industrial manipulators. In industrial use, in order to improve stability and avoid data transmission being interfered with, loss and delay problems, it is not recommended to use APP wireless control or computer software and other control methods. 2. Support drag teaching. Drag the manipulator arm to move by hand, and record the movement trajectory. The trajectory and position can also be fine-tuned through the touch screen, and complex programming can be completed by configuring the input and output IO. No complicated programming and hardware burning are required. It is also easy to operate the robotic arm for customers who do not have a programming foundation
- Intelligent palletizing goods arrangement. 1. Support palletizing 2KG/4.4LB objects. 2. High-strength processing of aluminum alloy robot body + movable parts, which can meet the requirements of 24 hours continuous work in the industry. 3. 57 closed loop stepper motor (with encoder, brake), high palletizing accuracy
- Support IO input and output control and multi-machine online coordination production line. Input and output IO 6pcs each, support external signal IO input to trigger control of the robot, or robot IO output signal to trigger control of external equipment
- Eight major work instruction operations and precise coordinates, speed settings, etc. The instruction set selection box will turn yellow when selected. Point instruction means going. The arc is to draw an arc. Straight line and straight line offset are both straight lines (the former is an absolute position, the latter is a relative position). DI/DO are IO input and output ports (each has 6 interfaces)
- The coordinate position and speed status of each step are displayed in real time
- Store up to 50 teaching points and support 3 recipes. A total of 3 operating formulas can be supported, and each formula supports 50 steps
- Repeat accuracy 0.3MM/0.01". Adopt joint coordinates and world coordinates. Designed according to the way of industrial robots, the position accuracy can be set, and the position can be adjusted through the demonstrator
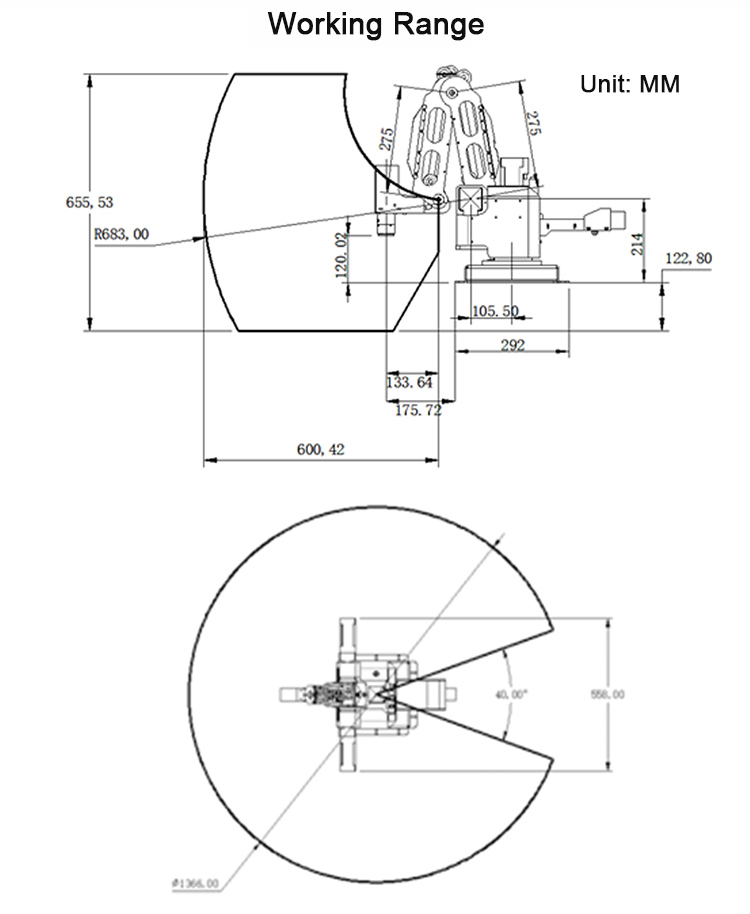
- Large working range. X axis -162° to 162°. Y axis -100° to 0°. Z axis -108° to 0°
Functional Instruction of the Robotic Arm:
- Robotic arm zero calibration protocol instruction
- Robotic arm stop protocol command
- Robotic arm control base protocol instruction
- Robotic arm control big arm motor protocol command
- Control arm motor protocol command
- Air pump switch protocol instruction
- Claw switch protocol command
- Get the current world coordinate (robotic arm) protocol command
- Get the current angle (robotic arm) protocol command
- Get the current number of entered steps (robotic arm) protocol command
- Cleaner protocol command
- Control walk point protocol command
- Control walk straight agreement instruction
- Control arc protocol command
- Control DI, DO protocol instructions
- Control gripper protocol command
- Control air pump protocol command
- Provide mechanical control serial port communication protocol
Basic Parameters:
- Number of axes: 4-Axis
- Load: Maximum 2KG/4.4LB
- Power supply input: 24V/18.75A
- Working voltage: 220V 50HZ
- Working temperature: -10℃ to 60℃
- Weight of robot arm: 26KG/57.3LB
- Material: body: aluminum alloy; base: heavier sheet metal; control box: sheet metal
Axis Motion Parameters:
- Y axis working range: -100° to 0°
- Z axis working range: -108° to 0°
- X axis working range: -162° to 162° (36° reserved for dead zone)
- Maximum span: 550mm/29.5"
Machine Physicality:
- Net weight: 26KG/57.3LB robotic arm
- Base size: 292 x 292mm/11.5 x 11.5"
- Body material: 6061 aluminum alloy anodized
- Maximum span: 750mm/29.5"
Movement Speed Parameters:
- Maximum speed of single arm joint: 300°/s
Precision Parameters:
- Repeat positioning accuracy: 0.3mm/0.01"
Stepper Motor Parameters:
- Holding torque: 2.2N/m
- Rated current: 5A
- Step angle: 1.8°
- Type: 57 closed loop stepper motor (with encoder, brake)
Planetary Reducer Parameters:
- Type: High-precision helical gear (not ordinary straight gear)
- Backlash: less than 3 arc minutes
Function Parameter:
- Linear interpolation, circular interpolation, acceleration and deceleration algorithm, input & output IO
Control Parameters:
- Jog teaching programming: the programming method is similar to that of large industrial robots
- Drag teaching programming: drag by hand, the demonstrator records the position and fine adjustment of the position
End Effector Parameters:
- Without end effector. Keep the end level. Fixtures, suction cups, pneumatic claws, etc. can be customized according to production needs
Package Included:
- 1 x Robot Body
- 1 x Control Box
- 1 x Touch Screen Demonstrator
- 1 x Robot Body-Control Box Connection Cable 2M/6.6FT
Note:
- End effector parts pictured are not included in the package, for demonstration purposes only. Thank you for your understanding!
FAQ:
1. Is it possible to set cycle work?
Yes. It supports movement node loop within 50 steps.
2. Can it be used as a robot teaching training?
Yes. This robot arm is small in size, easy to carry, and has three modes such as communication interface, peripheral interactive programming and learning robot use. Can be used for introductory teaching training and small industrial manufacturing.
3. Can it save teaching point when power-off?
Yes.
4. Can the robot be open sourced?
Not completely open source. The bottom layer provides a robotic arm control communication protocol, supports secondary development of peripherals and additional functions, interacts with external devices, and is online.